Plages de position v
La fonction "Plages de position v" permet de modifier le profil de mouvement en spécifiant une plage de positionnement ainsi qu'une vitesse, une décélération et une accélération correspondantes.
Les paramètres de mouvement peuvent être réglés individuellement pour chaque plage de position v. Il est ainsi possible de réaliser, p. ex., des applications avec différents paramètres dynamiques pour les trajets à pleine charge et à vide.
Exemple d'application
Prise douce du chargement, comme p. ex. lors du soulèvement d'une palette par le dispositif de manutention de chargement. L'activation de cette fonction via le mot de commande application doit être réalisée à l'arrêt. Si une activation a lieu pendant le mouvement, la vitesse est d'abord ralentie à "0" à l'aide du bloc fonction FCB 26 avant que le profil de mouvement ne soit exécuté. Le profil de mouvement n'est exécuté que si la plage de position v se trouve sur la trajectoire de la position cible ou si la position cible se trouve dans la plage de position v.
Remarque : l'activation de cette fonction est possible uniquement pour les axes linéaires en mode d'exploitation 400 (positionnement absolu). Si une position de came v avec plage de came v non valide est sélectionnée, le moteur est arrêté à l'aide du bloc fonction FCB 26. Tenir compte de la règle suivante pour définir les plages de position v.
Limite gauche v ≤ limite droite v
Si une plage de position v non valide est sélectionnée, celle-ci est ignorée et le processus de positionnement normal est effectué. Un mouvement de came v actif est signalé via le mot d'état application.
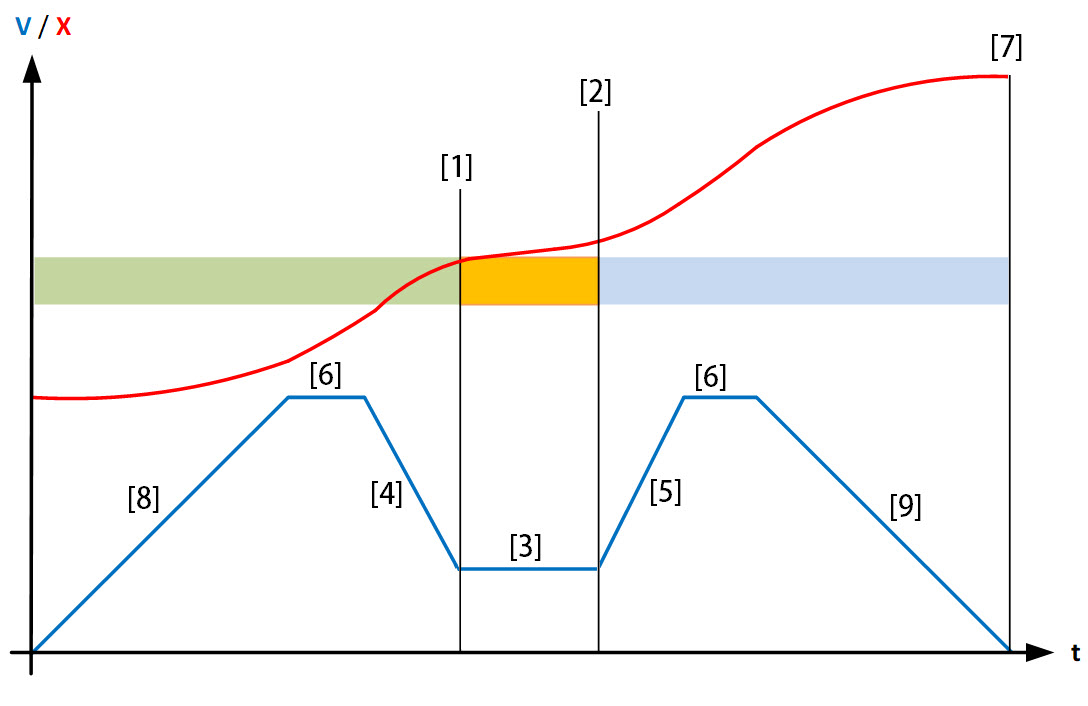
1 | Limite gauche |
2 | Limite droite |
3 | Vitesse |
4 | Décélération |
5 | Accélération |
6 | Consigne fixe : vitesse tableau |
7 | Consigne fixe : position de tableau |
8 | Consigne fixe : accélération tableau |
9 | Consigne fixe : décélération tableau |
