Control via IEC program
INFORMATION

The following examples can be imported in the IEC Editor. In the IEC Editor, open the menu [Tools] > [Scripting] > [Scripts] > [R], and select the menu entry [Robotics_Examples.py].
The following application examples show how the software module can be controlled via the IEC user program. The respective program must then be called in USER_PRG.Main() as follows, passing the robot instance to the example program:
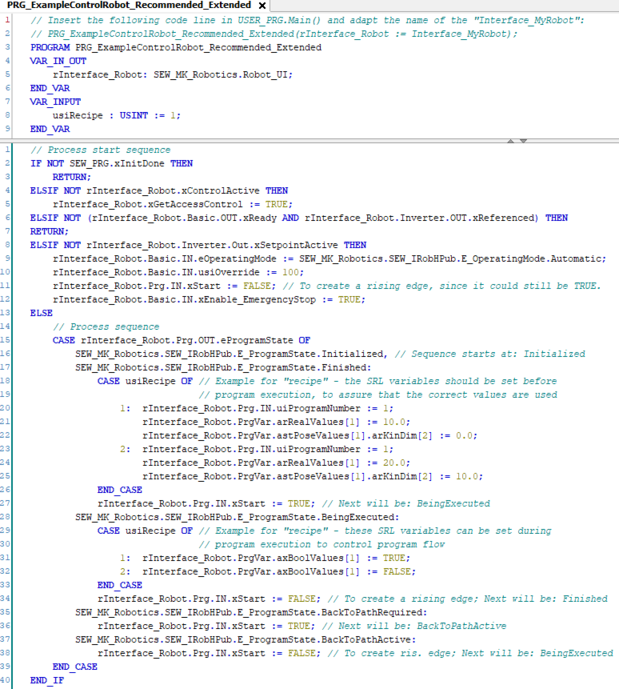
PRG_ExampleControlRobot_Recommended_Extended(
rInterface_Robot := Interface_MyRobot);
4 example programs are provided:
- Control with BackToPath (recommended)
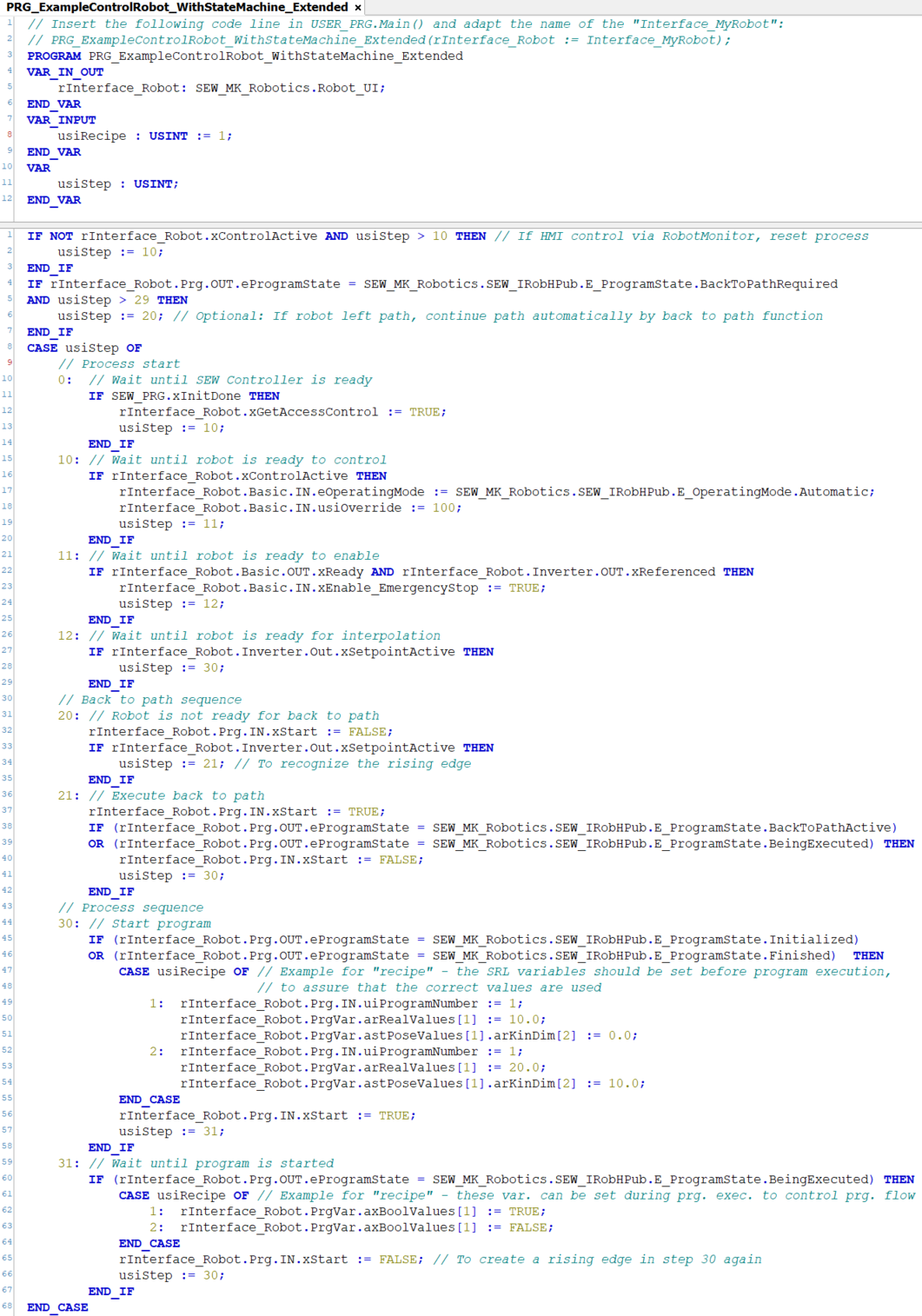
- Control with BackToPath and state machine
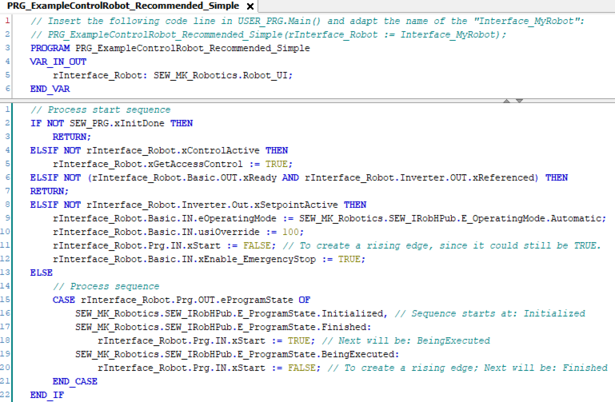
- Control without BackToPath
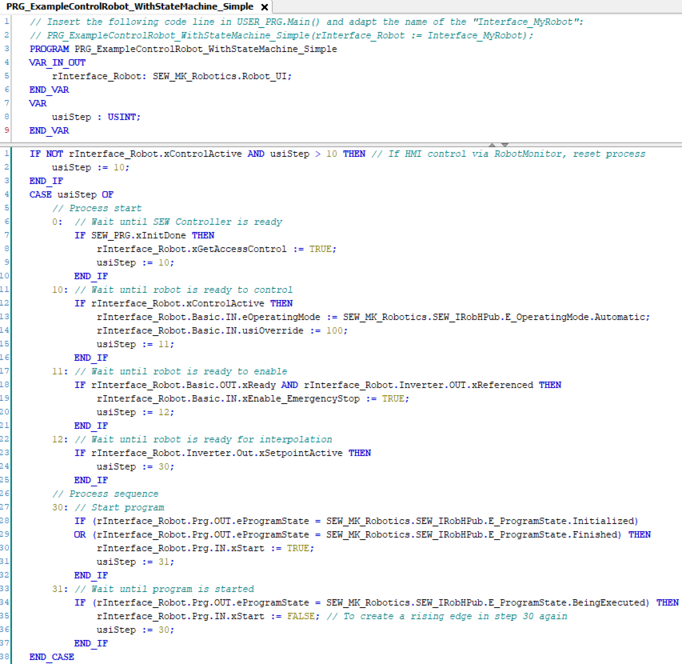
- Control without BackToPath via state machine
Control without state machine is recommended so as to generally rule out any snagging in a step.
For detailed information on the signals and the processing sequence, refer to chapter Control via process controller.
Additional information