Gelenke
Konfiguration der Not-Halt-Rampen siehe Kapitel Not-Halt-Rampen und Software-Endschalter der Gelenke.
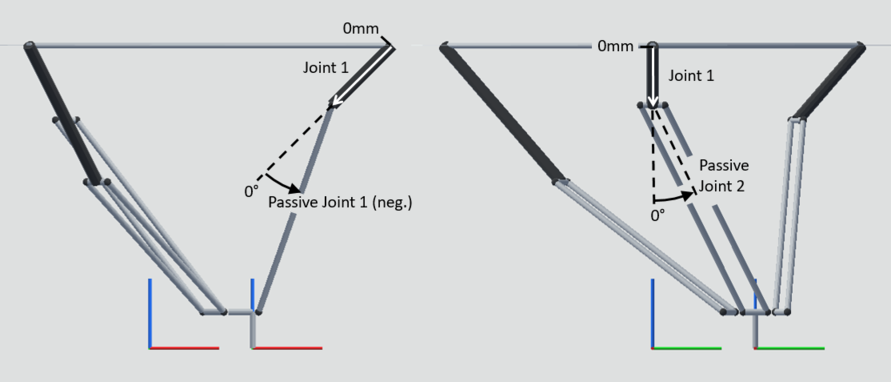
Zusätzlich zu den Gelenkachsen sind 6 nicht-angetriebene Gelenke zu konfigurieren. Diese wirken als Software-Endschalter.
Die Passive Joints 1 und 2 beziehen sich auf Arm 1 und sind in der Abbildung dargestellt. Die Passive Joints 3/4 bzw. 5/6 beziehen sich auf Arm 2 bzw. 3 und entsprechen in ihrer Funktionalität rotationssymmetrisch verdreht den Passive Joints 1 bzw. 2.
Parameterbezeichnung | Zusatzinformation |
|---|---|
Ellbogenwinkel 1 | Winkel zwischen Linearachse 1 und Unterarm 1 in der senkrechten Ebene, in der sich die Linearachse 1 bewegt. |
Scherwinkel 1 | Winkel zwischen der senkrechten Ebene, in der sich die Linearachse 1 bewegt, und dem Unterarm 1. |
Ellbogenwinkel 2 | Winkel zwischen Linearachse 2 und Unterarm 2 in der senkrechten Ebene, in der sich die Linearachse 2 bewegt. |
Scherwinkel 2 | Winkel zwischen der senkrechten Ebene, in der sich die Linearachse 2 bewegt, und dem Unterarm 2. |
Ellbogenwinkel 3 | Winkel zwischen Linearachse 3 und Unterarm 3 in der senkrechten Ebene, in der sich die Linearachse 3 bewegt. |
Scherwinkel 3 | Winkel zwischen der senkrechten Ebene, in der sich die Linearachse 3 bewegt, und dem Unterarm 3. |
