Desynchronizing directly with time-based transition
In the case of a time-based transition, desynchronization is carried out during a settable period of time, regardless of the movement of the master axis.
Control the axis in the Camming.Config.Stop structure as follows:
Interface in the IEC Editor

Procedure
- While the master axis is moving, the start signal xStart is removed in the "Camming" mode of the slave axis.
- With the configuration eStopMode = "CW_CCW_DIRECT" and eTransitionType = "TIMEBASED", the eGearingState state switches immediately from "ACTIVE" (3) back to "GEAR_OUT" (5).
- After the configured desynchronization time lrGearOutTime = "1.0" [s] has passed, the slave axis stops. The eGearingState state switches from "GEAR_OUT" (5) to "STOPPED" (0).
Trace recording
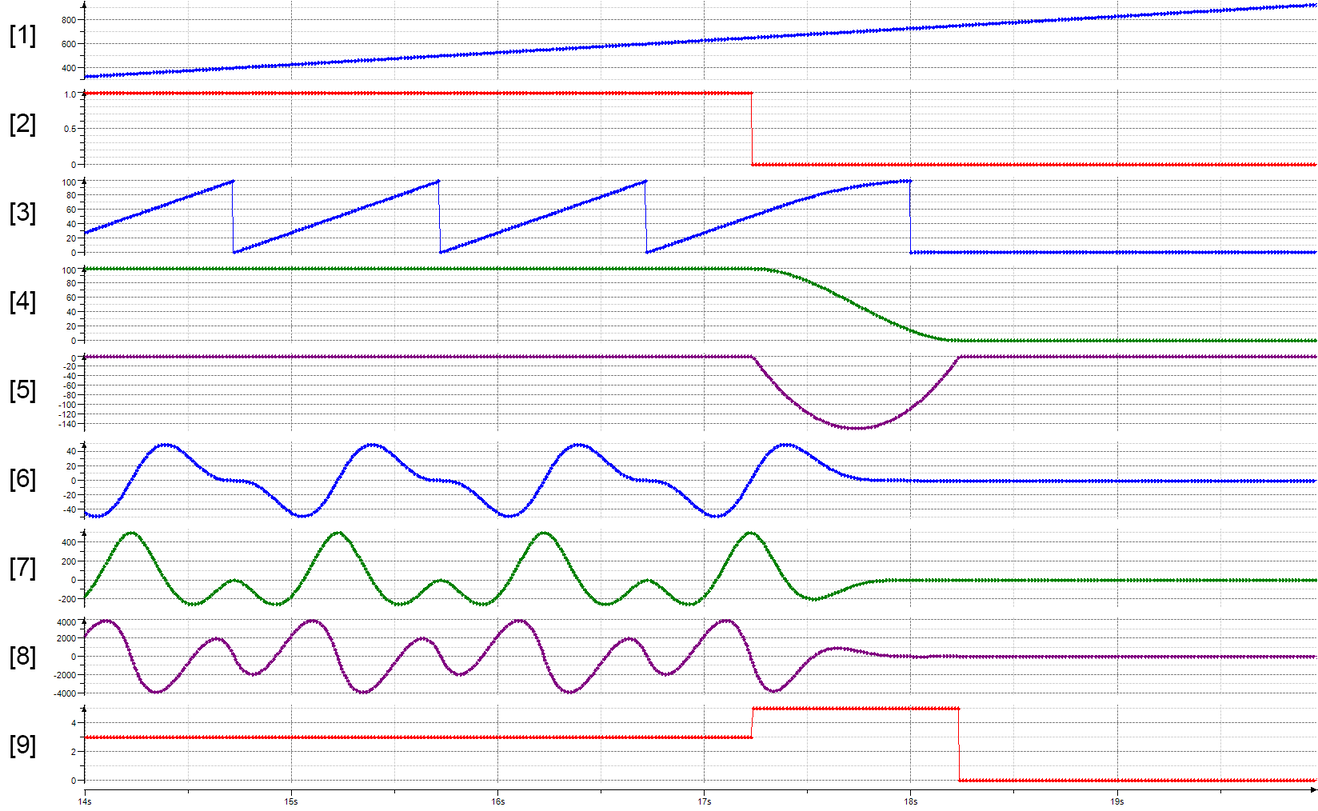
[1] | Position of the master axis |
[2] | xStart start signal of the Camming mode |
[3] | Position of the internal master |
[4] | Speed of the internal master |
[5] | Acceleration of the internal master |
[6] | Position of the slave axis |
[7] | Speed of the slave axis |
[8] | Acceleration of the slave axis |
[9] | eGearingState state of the Camming mode |
A decisive factor for the time-based transition is that it is performed independently of the movement of the master axis, as illustrated by the following trace recording:
Procedure
- While the master axis is in the idle state, the xStart start signal is removed in the "Camming" mode of the slave axis.
- With the configuration eStopMode = "CW_CCW_DIRECT" and eTransitionType = "TIMEBASED", the eGearingState state switches immediately from "ACTIVE" (3) back to "GEAR_OUT" (5).
- This state is maintained until the configured desynchronization time lrGearOutTime = "1.0" [s] has passed.
- Then the eGearingState state switches from "GEAR_OUT" (5) to "STOPPED" (0), even if the master axis is not moving.
Trace recording
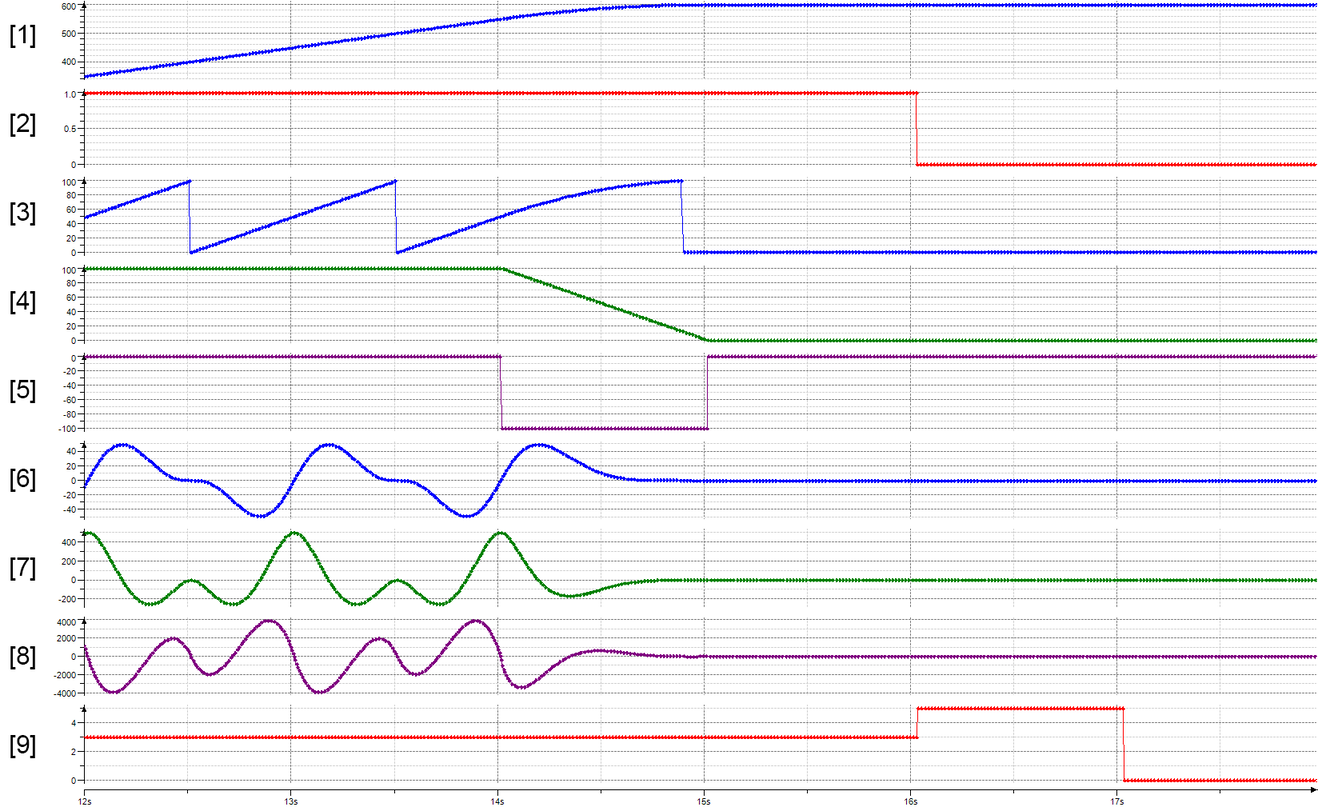
[1] | Position of the master axis |
[2] | xStart start signal of the Camming mode |
[3] | Position of the internal master |
[4] | Speed of the internal master |
[5] | Acceleration of the internal master |
[6] | Position of the slave axis |
[7] | Speed of the slave axis |
[8] | Acceleration of the slave axis |
[9] | eGearingState state of the Camming mode |
