Closed-loop dancer position control (TensionDancer)
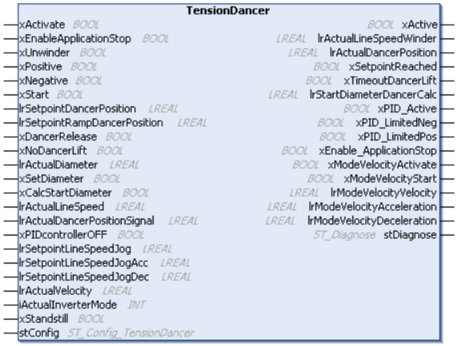
The TensionDancer function block contains control and status variables for the closed-loop dancer position control.
Overview
Start condition
Variable | State | |
|---|---|---|
xPositive | 0 | 1 |
xNegative | 1 | 0 |
xStart | 1 | 1 |
Process status – lead speed = 0, drive at standstill:
- The xPositive and xNegative signals determine the direction of rotation, so that the drive acts as an unwinder or rewinder (xUnwinder).
Without automatic calculation of start diameter (xCalcStartDiameter):
- A start diameter must be specified via lrActualDiameter until the dancer has reached the setpoint position window (xSetpointReached = "TRUE").
- With the start condition, the drive accelerates with lrAccDecMax (ST_Config_General) to the dancer lifting/lowering speed uiDancerLiftSpeed (ST_Config_TensionDancer). The winding or unwinding of the material guides the dancer to the setpoint position lrSetpointDancer. When the setpoint position window is reached (xSetpointReached = "TRUE"), the PID controller is switched on and the rewinding function is completed.
With automatic calculation of start diameter (xCalcStartDiameter):
- With the start condition, the drive accelerates within 3 seconds to the dancer lifting/lowering speed uiDancerLiftSpeed (ST_Config_TensionDancer). The winding or unwinding of the material initially guides the dancer to the lowering position uiDancerLiftDownPos (ST_ConfigDancer). Then the dancer is lifted to the dancer setpoint position lrSetpointDancer and the start diameter is calculated. When the setpoint position window is reached, the PID controller is switched on and the rewinding function is completed. The calculated start diameter lrStartDiameterCalc can be specified as lrActualDiameter and set with xSetDiameter = "TRUE".
Process status – lead speed > 0, drive rotates, setpoint reached:
- The change of the dancer setpoint position lrSetpointDancer is done with the setpoint ramp lrSetpointRampTension.
Stop condition
Variable | State | |||||
|---|---|---|---|---|---|---|
xPositive | 0 | 1 | 0 | 1 | 0 | 1 |
xNegative | 0 | 1 | 1 | 0 | 0 | 1 |
xStart | 1 | 0 | 0 | 0 | 0 | 1 |
- The PID controller is switched off. A rotating drive is decelerated with lrLineSpeedStopDec (ST_Config_General) to a standstill.
Additional information
