Tänzerlageregelung (TensionDancer)
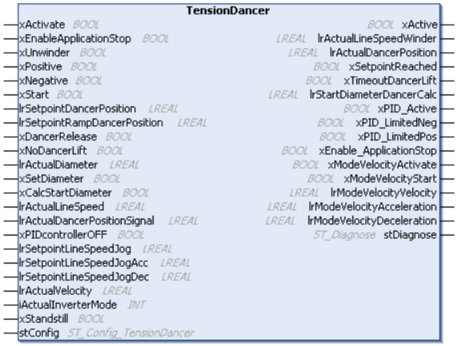
Der Funktionsbaustein TensionDancer enthält Steuer- und Statusvariablen für die Tänzerlageregelung.
Übersicht
Startbedingung
Variable | Zustand | |
|---|---|---|
xPositive | 0 | 1 |
xNegative | 1 | 0 |
xStart | 1 | 1 |
Prozesszustand - Leitgeschwindigkeit = 0, Antrieb steht:
- Mit den Signalen xPositive und xNegative wird die Drehrichtung so bestimmt, dass der Antrieb als Abwickler oder Aufwickler (xUnwinder) arbeitet.
Ohne automatische Startdurchmesserberechnung (xCalcStartDiameter):
- Über lrActualDiameter muss solange ein Startdurchmesser vorgegeben werden, bis der Tänzer das Sollpositionsfenster erreicht hat (xSetpointReached = "TRUE").
- Mit der Startbedingung beschleunigt der Antrieb mit lrAccDecMax (ST_Config_General) auf die Tänzer-Anhebe-/Absenkgeschwindigkeit uiDancerLiftSpeed (ST_Config_TensionDancer). Das Aufwickeln oder Abwickeln des Materials führt den Tänzer in die Sollposition lrSetpointDancer. Wenn das Sollpositionsfenster erreicht ist (xSetpointReached = "TRUE"), wird die PID-Regelung eingeschaltet und die Anwickelfunktion beendet.
Mit automatische Startdurchmesserberechnung (xCalcStartDiameter):
- Mit der Startbedingung beschleunigt der Antrieb innerhalb 3 Sekunden auf die Tänzer-Anhebe-/Absenkgeschwindigkeit uiDancerLiftSpeed (ST_Config_TensionDancer). Das Aufwickeln oder Abwickeln des Materials führt den Tänzer zunächst auf die Absenkposition uiDancerLiftDownPos (ST_ConfigDancer). Danach wird der Tänzer auf die Tänzer-Sollposition lrSetpointDancer angehoben und der Startdurchmesser berechnet. Wenn das Sollpositionsfenster erreicht ist, wird die PID-Regelung eingeschaltet und die Anwickelfunktion beendet. Der berechnete Startdurchmesser lrStartDiameterCalc kann als lrActualDiameter vorgegeben und mit xSetDiameter = "TRUE" gesetzt werden.
Prozesszustand - Leitgeschwindigkeit > 0, Antrieb dreht, Sollwert erreicht:
- Die Änderung der Tänzer-Sollposition lrSetpointDancer erfolgt mit der Sollwertrampe lrSetpointRampTension.
Stoppbedingung
Variable | Zustand | |||||
|---|---|---|---|---|---|---|
xPositive | 0 | 1 | 0 | 1 | 0 | 1 |
xNegative | 0 | 1 | 1 | 0 | 0 | 1 |
xStart | 1 | 0 | 0 | 0 | 0 | 1 |
- Die PID-Regelung wird abgeschaltet. Ein drehender Antrieb wird mit lrLineSpeedStopDec (ST_Config_General) bis zum Stillstand abgebremst.
Weiterführende Informationen
