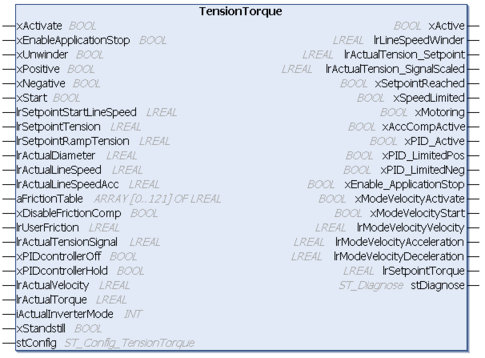
Torque control – optional with closed-loop tension control (TensionTorque)
The TensionTorque function block contains control and status variables for torque control.
Overview
Start condition
Variable | State | |
|---|---|---|
xPositive | 0 | 1 |
xNegative | 1 | 0 |
xStart | 1 | 1 |
Process status – lead speed = 0, drive at standstill:
- The xPositive and xNegative signals determine the direction of rotation, so that the drive acts as an unwinder or rewinder (xUnwinder).
- The tension (lrSetpointTension) is built up with the setpoint ramp tension (lrSetpointRampTension), with the drive accelerating at the configured value lrAccDecMax (ST_Config_General) to the rewinding speed (lrSetpointStartLineSpeed) in positive or negative direction of rotation, if the torque corresponding to the tension is sufficient.
Process status – lead speed > 0, drive rotates, setpoint reached:
- The setpoint tension (lrSetpointTension) is changed with the speed specified in the setpoint ramp (lrSetpointRampTension).
Stop condition
Variable | State | |||||
|---|---|---|---|---|---|---|
xPositive | 0 | 1 | 0 | 1 | 0 | 1 |
xNegative | 0 | 1 | 1 | 0 | 0 | 1 |
xStart | 1 | 0 | 0 | 0 | 0 | 1 |
- A rotating drive is decelerated to a standstill with the lrLineSpeedStopDec deceleration specified in ST_Config_General as the maximum deceleration. With xStart = "0" the tension is additionally decreased with the tension ramp (l3).
Additional information
