Drehmomentsteuerung - optional mit Zugkraftregelung (TensionTorque)
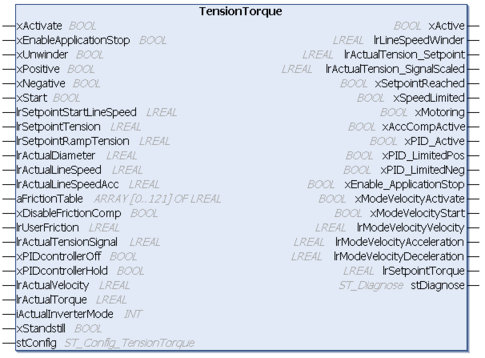
Der Funktionsbaustein TensionTorque enthält Steuer- und Statusvariablen für die Drehmomentsteuerung.
Übersicht
Startbedingung
Variable | Zustand | |
|---|---|---|
xPositive | 0 | 1 |
xNegative | 1 | 0 |
xStart | 1 | 1 |
Prozesszustand - Leitgeschwindigkeit = 0, Antrieb steht:
- Mit den Signalen xPositive und xNegative wird die Drehrichtung so bestimmt, dass der Antrieb als Abwickler oder Aufwickler (xUnwinder) arbeitet.
- Die Zugkraft (lrSetpointTension) wird mit der Sollwertrampe Zugkraft (lrSetpointRampTension) aufgebaut, wobei der Antrieb mit dem konfigurierten Wert lrAccDecMax (ST_Config_General) auf die Anwickelgeschwindigkeit (lrSetpointStartLineSpeed) in positiver oder negativer Drehrichtung beschleunigt, wenn das der Zugkraft entsprechende Drehmoment ausreicht.
Prozesszustand - Leitgeschwindigkeit > 0, Antrieb dreht, Sollwert erreicht :
- Die Änderung der Sollzugkraft (lrSetpointTension) erfolgt mit der in der Sollwertrampe (lrSetpointRampTension) angegebenen Geschwindigkeit.
Stoppbedingung
Variable | Zustand | |||||
|---|---|---|---|---|---|---|
xPositive | 0 | 1 | 0 | 1 | 0 | 1 |
xNegative | 0 | 1 | 1 | 0 | 0 | 1 |
xStart | 1 | 0 | 0 | 0 | 0 | 1 |
- Ein drehender Antrieb wird maximal mit der in ST_Config_General angegebenen Verzögerung lrLineSpeedStopDec bis zum Stillstand abgebremst. Mit xStart = "0" wird zusätzlich die Zugkraft mit der Zugkraftrampe (I3) abgebaut.
Weiterführende Informationen
