Evaluación de encoder combinada
Si la posición del encoder del motor no refleja claramente la posición de la instalación, se puede utilizar un segundo encoder (encoder lineal) directamente en la instalación.
Ejemplos
- El motor de tracción de un sistema transelevador puede deslizarse sobre el carril (deslizamiento). Un encoder por láser adicional determina la posición real del sistema transelevador.
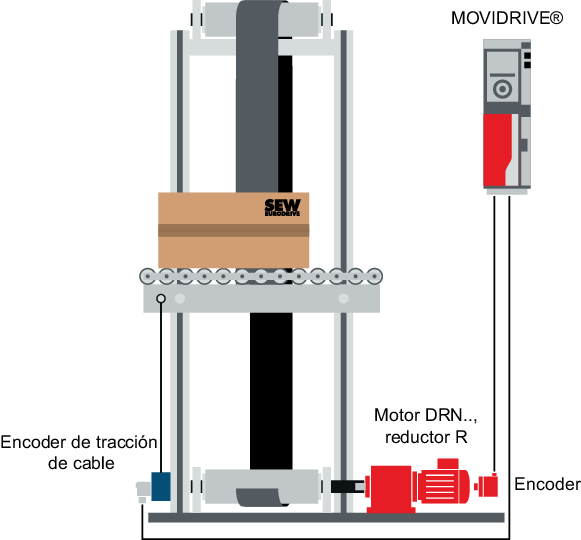
- Un accionamiento de elevación levanta una cesta de elevación sobre una correa. La correa se prolonga en función del peso de la carga. Un encoder de tracción de cable adicional determina la posición real de la cesta de elevación.
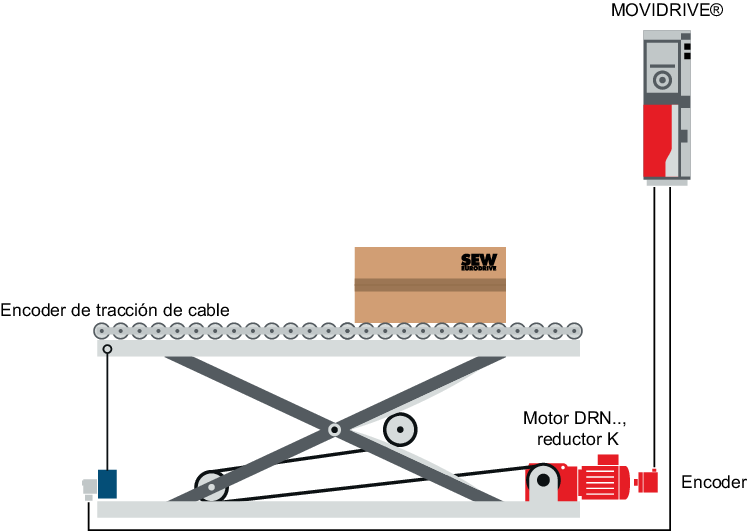
- Un elevador pantógrafo tiene una altura de mesa que no se ajusta linealmente a la posición del encoder del motor debido al mecanismo de tijera. Un encoder de tracción de cable adicional determina la posición real de altura de la mesa.
A menudo, la resolución por recorrido del encoder lineal es considerablemente menor que la del encoder del motor. Si se regula la posición en el encoder lineal, se debe reducir la rigidez del control de lazo cerrado, lo cual resulta en una respuesta dinámica menor y en más tiempo para alcanzar la posición de destino.
La evaluación combinada de encoders vincula la información del encoder del motor con la información del encoder lineal y permite una regulación del posicionamiento en el encoder lineal con la rigidez que aportaría un encoder de motor. Esto se traduce en una regulación del posicionamiento muy dinámica, mientras que la instalación el destino de forma considerablemente más rápida. Las desviaciones del posicionamiento se estabilizan muy rápidamente.
La evaluación combinada de encoders está incluida en el firmware de los variadores. En aplicaciones con encoder lineal, SEW‑EURODRIVE recomienda activar la evaluación combinada de encoders.
