Avaliação combinada do encoder
Se a posição do encoder do motor não refletir claramente a posição do sistema, um segundo encoder (encoder linear) pode ser usado diretamente no sistema.
Exemplos
- O motor de um sistema de armazenagem/coleta pode escorregar no trilho (escorregamento). Um encoder a laser adicional determina a posição real do sistema de armazenagem/coleta.
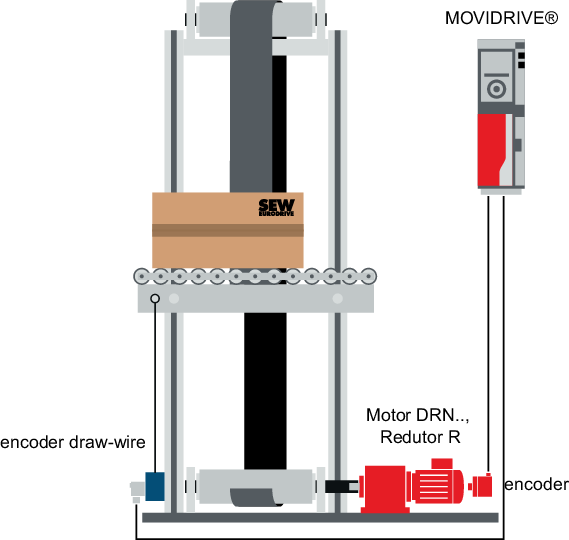
- Um acionamento de elevação levanta um cesto de elevação por meio de uma correia. A correia aumenta de comprimento dependendo do peso da carga. Um encoder draw-wire adicional determina a posição real do cesto de elevação.
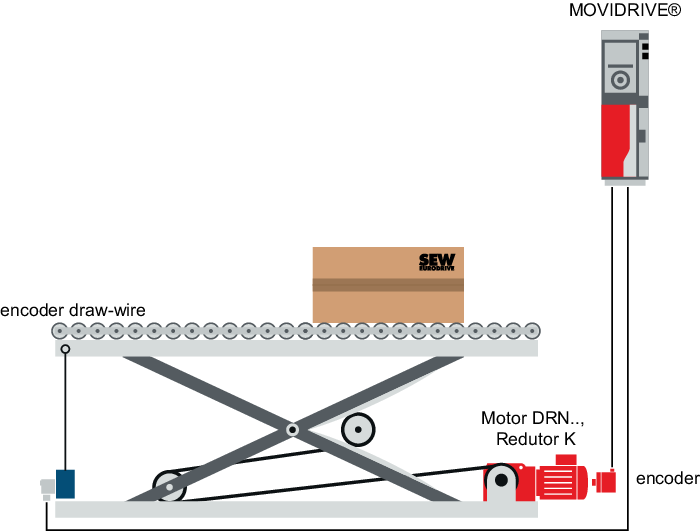
- Devido ao mecanismo pantográfico, uma mesa pantográfica tem uma altura de mesa que não se ajusta linearmente à posição do encoder do motor. Um encoder draw-wire adicional determina a posição real da altura da mesa.
Muitas vezes, a resolução por encoder linear é significativamente menor que a do encoder do motor. Se a posição for controlada pelo encoder linear, a rigidez do controle deve ser reduzida. Isso leva a menos resposta dinâmica e mais tempo para atingir a posição final.
A avaliação combinada de encoders vincula as informações do encoder do motor com as informações do encoder linear e permite o controle de posicionamento no encoder linear com a rigidez que um encoder do motor forneceria. Isso resulta em um controle de posicionamento muito dinâmico, o que significa que o sistema atinge seu objetivo muito mais rápido. Desvios de posição são corrigidos muito rapidamente.
A avaliação combinada de encoders está incluída no firmware dos conversores. A SEW-EURODRIVE recomenda ativar a avaliação combinada de encoders para aplicações com encoder linear.
