Modi operativi
NOTA
Il modulo software MOVIKIT® Velocity Drive utilizza il modo operativo controllo della velocità (200). Il modo operativo non può essere attivato manualmente con l'impiego di MOVIKIT® Velocity Drive.
I modi operativi di MOVIKIT® Positioning Drive e i relativi campi di applicazione:
Modo operativo | decimale | Descrizione |
|---|---|---|
Modo jog | 100 | modo jog – con regolazione posizione (FCB 20) retroazione dell'encoder necessaria |
101 | modo jog – con controllo della velocità (FCB 05) retroazione dell'encoder non necessaria | |
Specificazione della velocità | 200 | controllo della velocità (FCB 05) retroazione dell'encoder non necessaria |
Modo ricerca zero | 300 | ricerca di zero – offset tramite parametro (FCB 12) |
301 | ricerca di zero – offset tramite bus di campo (FCB 12) | |
Servizio posizionamento
| 400 | posizionamento assoluto (FCB 09) |
401 | posizionamento relativo (FCB 09) | |
402 | posizionamento modulo – direzione positiva (FCB 09) | |
403 | posizionamento modulo – direzione negativa (FCB 09) | |
404 | posizionamento modulo – direzione ottimizzata (FCB 09) | |
420 | posizionamento Touchprobe – posizione di destinazione assoluta – distanza residua in direzione di marcia (FCB 09) | |
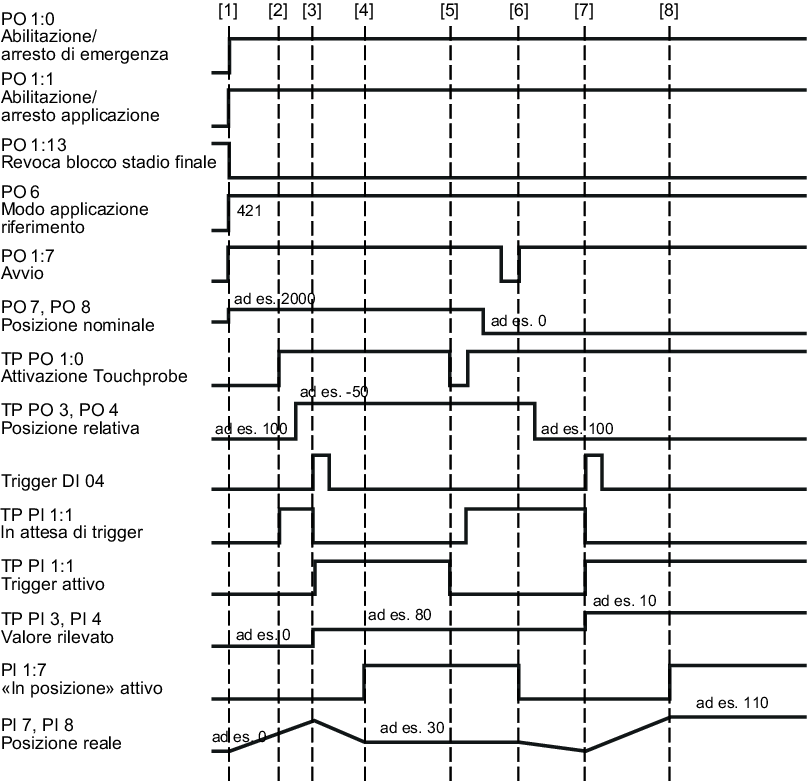
421 | posizionamento Touchprobe – posizione di destinazione assoluta – distanza residua con segno algebrico (FCB 09) | |
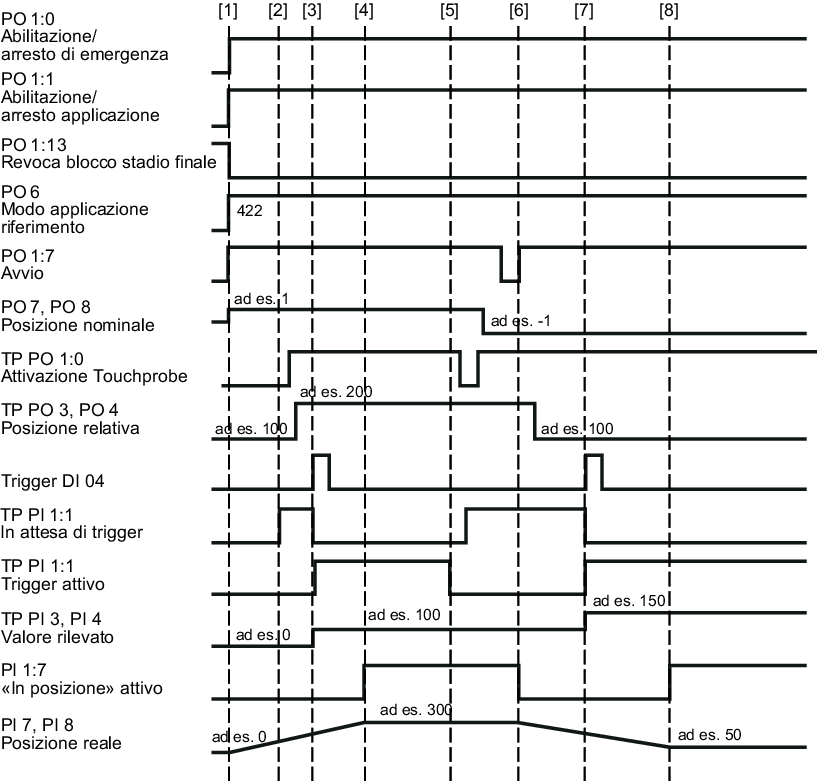
422 | posizionamento Touchprobe – continuo – distanza residua in direzione di marcia (FCB 09) | |
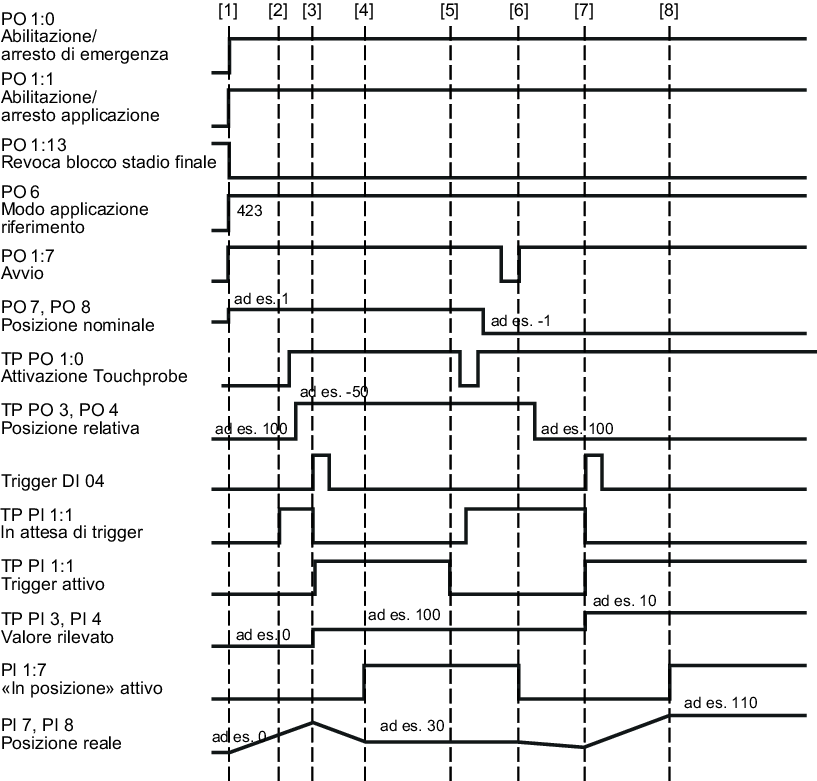
423 | posizionamento Touchprobe – continuo – distanza residua con segno algebrico (FCB 09) | |
Test freno | 700 | test freno (FCB 21) modo operativo per la funzione supplementare Test freno |
NOTA
Per il funzionamento dei moduli funzionali sono valide le configurazioni eseguite in MOVISUITE®. I modi operativi modulo possono essere utilizzati solo se nella configurazione del modulo software in [Funzioni di monitoraggio] > [Valori limite] è stata impostata una limitazione ciclo.
NOTA
Il comportamento nello stato di fermo dipende dall'impostazione del parametro "Comportamento nello stato di fermo" (indice 8563.1/8564.1).
NOTA
A partire dalla versione 2.1 dei moduli software, durante la prima selezione dei modi applicazione "401: posizionamento relativo", "402: posizionamento modulo – direzione positiva", "403: posizionamento modulo – direzione negativa" e "404: posizionamento modulo – direzione ottimizzata" si passa brevemente nel FCB 26, per impostare correttamente il punto di riferimento del posizionamento relativo.
Se l'azionamento è ancora in movimento nel momento della selezione del modo applicazione 401, si decelera fino all'arresto con FCB 26. Il punto di interruzione è il punto di riferimento per il posizionamento relativo. Passando nei modi applicazione 402, 403 e 404 non avviene alcun ritardo di frenatura.
Al fine di spiegare il modo di funzionamento, si trova nei seguenti capitoli un diagramma dei tempi per ogni modo operativo, nonché la sequenza di processo con una descrizione dei segnali da impostare e gli stati segnale.
- Presupposti per i diagrammi dei tempi
- Modo jog (100/101)
- Controllo della velocità (200)
- Modo ricerca zero (300/301)
- Servizio di posizionamento assoluto (400)
- Servizio posizionamento relativo (401)
- Servizio posizionamento modulo – direzione positiva (402)
- Servizio posizionamento modulo – direzione negativa (403)
- Servizio posizionamento modulo – direzione ottimizzata (404)
- Servizio posizionamento Touchprobe – posizione di destinazione assoluta – distanza residua in direzione di marcia (420)
- Servizio posizionamento Touchprobe – posizione di destinazione assoluta – distanza residua con segno algebrico (421)
- Servizio posizionamento Touchprobe – continuo – distanza residua in direzione di marcia (422)
- Servizio posizionamento Touchprobe – continuo – distanza residua con segno algebrico (423)