Procedure
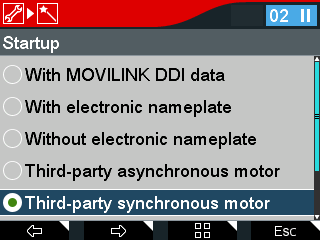
The following chapter describes the most important menus for starting up a third-party synchronous motor using an example.
Note the following requirements:
- A motor with the values from the table Technical data – Example synchronous is assumed.
- The screenshots always display the corresponding data of the example.
- You have started startup and selected the drive train.
- The following menus are listed in the order they appear during startup.
- Use the function keys to navigate between the menus.
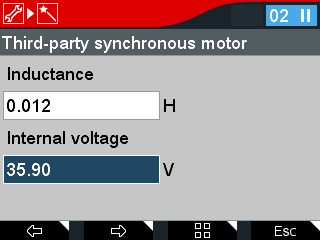
Third-party synchronous motor
Additional information
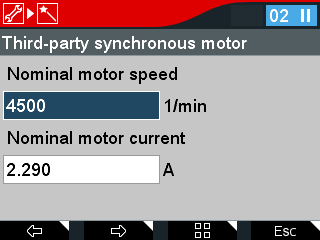
- Nominal motor speed and nominal motor current
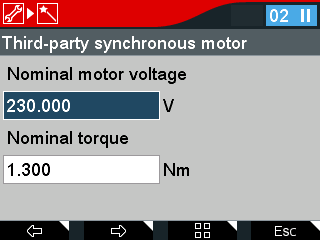
- Nominal motor voltage and nominal torque
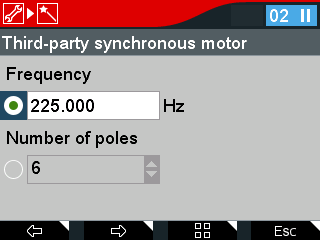
- Frequency and number of poles
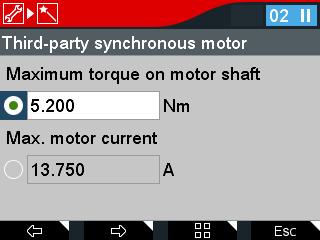
- Maximum torque at motor shaft and maximum motor current
- Inductance and internal voltage
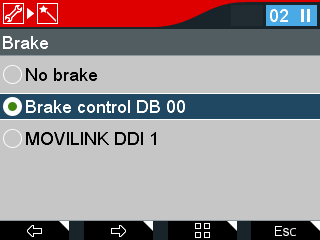
- Brake
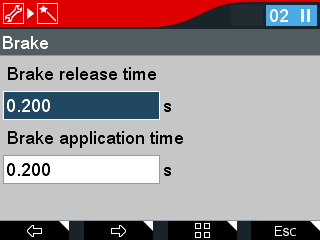
- Brake – Times
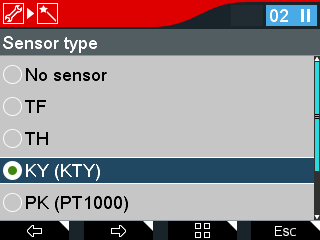
- Sensor type
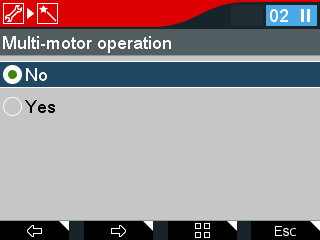
- Multi-motor operation
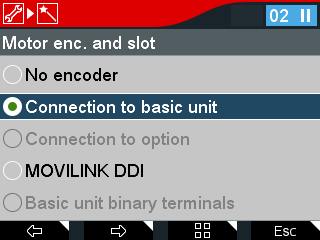
- Motor encoder and slot
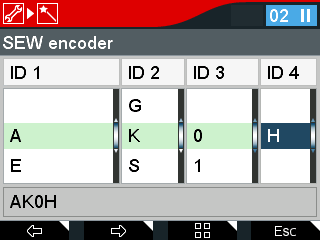
- SEW encoder
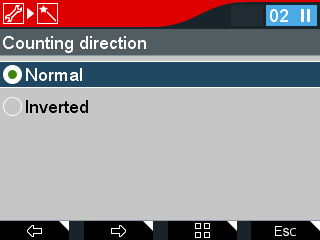
- Counting direction
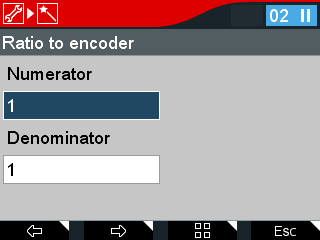
- Gear ratio to encoder
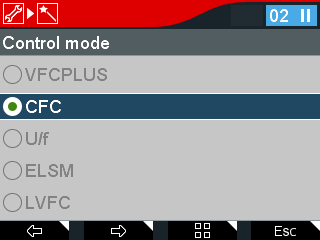
- Control mode
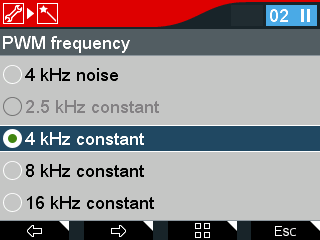
- PWM frequency
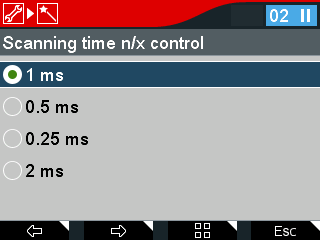
- Speed/position controller sampling cycle
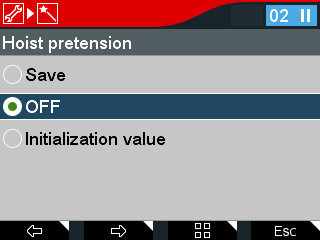
- Hoist pretension
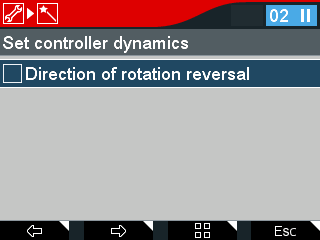
- Setting controller dynamics
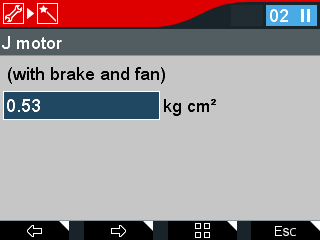
- J motor
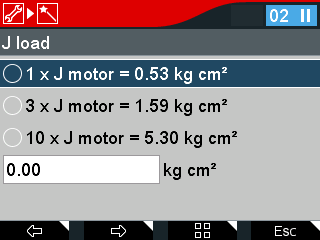
- J load
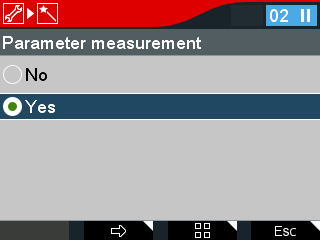
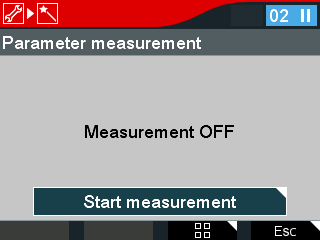
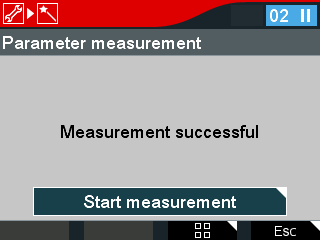
- Parameter measurement