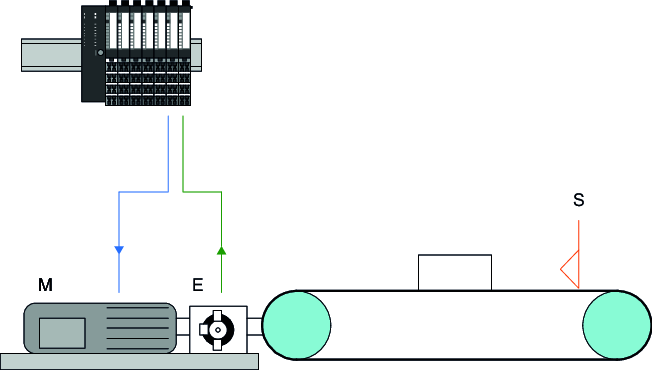
La figura che segue mostra la struttura di un tipico controllo di posizionamento.
M
Motore passo-passo
E
Encoder
S
Finecorsa software