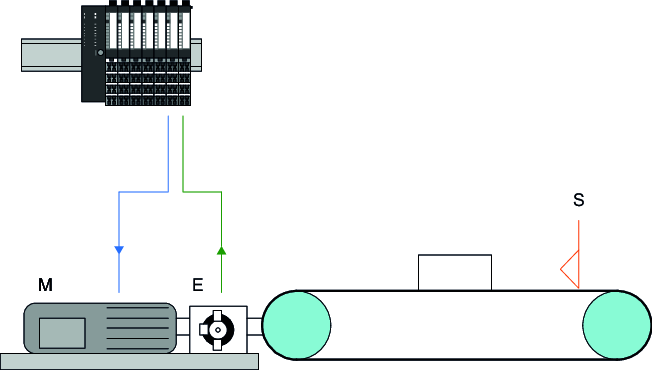
A figura a seguir mostra a estrutura de um controle de posicionamento típico.
M
Motor de passo
E
Encoder
S
Chave fim de curso de software