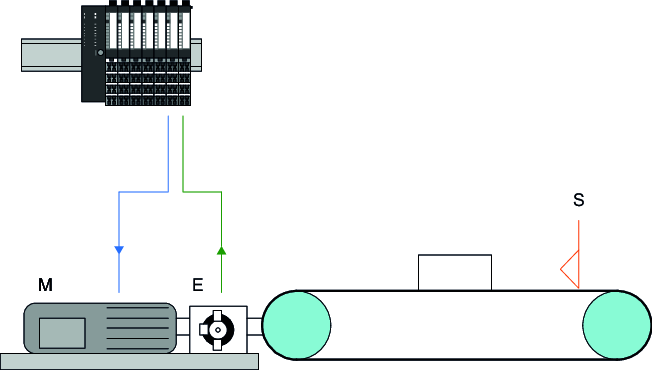
Aşağıdaki şekilde tipik bir pozisyon kontrolünün yapısı gösterilmektedir.
M
Adım motoru
E
Enkoder
S
Yazılım limit anahtarı