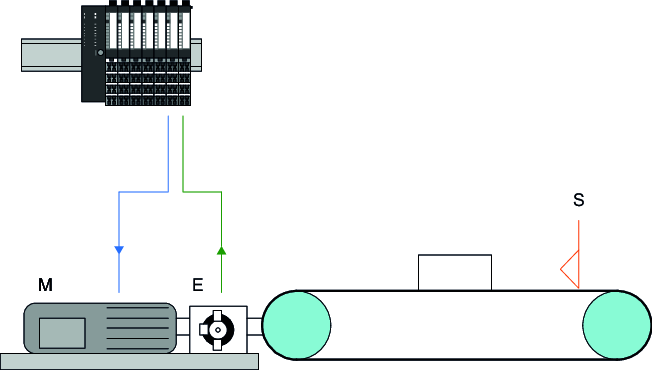
La siguiente imagen muestra la estructura de un control de posicionamiento típico.
M
Motor paso a paso
E
Encoder
S
Final de carrera de software