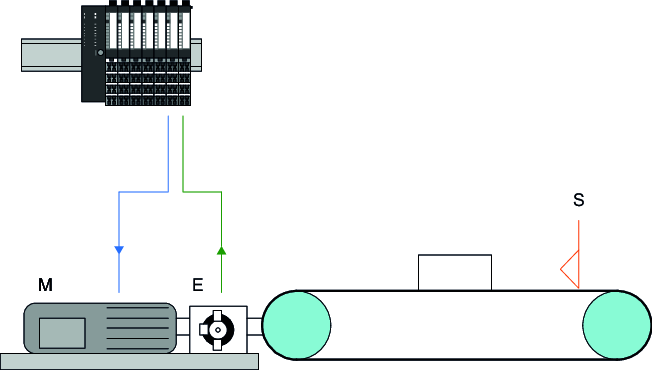
The following figure shows the structure of a typical positioning control system.
M
Stepper motor
E
Encoder
S
Software limit switches