SS2-t (Safe Stop 2) – Parada segura 2 com gerenciamento de tempo
Com a função SS2-t ativa, o motor é parado eletricamente pelo conversor de frequência. No estado parado, o conversor de frequência fornece a energia para manter o motor na posição. Após um tempo definido relacionado à segurança, a posição deverá ser monitorada (função SOS de acordo com EN 61800‑5‑2) de forma segura. Um movimento no estado parado aciona a função do componente de segurança STO. A paralisação deve ser assegurada em função da STO, por exemplo, por um freio mecânico.
Essa função do componente de segurança corresponde à parada controlada do acionamento conforme EN 60204‑1, categoria de parada 2.
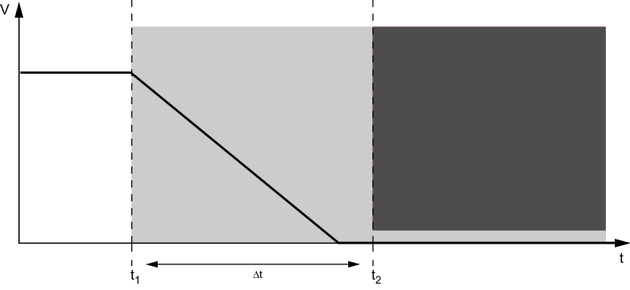
| = | Função do componente de segurança monitorada |
| = | Função do componente de segurança STO ativa |
v | = | Velocidade |
t | = | Tempo |
t1 | = | Momento em que a SS2-t é ativada e a desaceleração do motor é acionada. |
t2 | = | Momento em que a SOS é ativada. |
Δt | = | Intervalo de tempo relacionado à segurança |
INFORMAÇÃO
- A parada não é monitorada pela função SS2-t.
- O intervalo de tempo relacionado à segurança Δt dá ao acionamento a possibilidade para vir a parar. Em caso de irregularidade, o acionamento não vai para o estado parado e apenas fica desenergizado no momento t2 (STO).
