Simulation
INFORMATION

The simulation parameters are relevant for the display in the 3D simulation and for the physics simulation. They are not relevant for a correct kinematics transformation and are therefore located in the "Simulation" submenu of the kinematic model.
Currently, up to two telescopic shafts can be configured. For this purpose, the respective telescopic shaft must be activated. Then the offsets from the base coordinate system or the tool plate to the cardan joints can be specified. If a physics simulation should be performed, the inertia properties of the telescopic shaft parts must also be parameterized. See also chapter Physics (MOVIKIT® Robotics).
|
Parameter name | Additional information | |
|---|---|---|
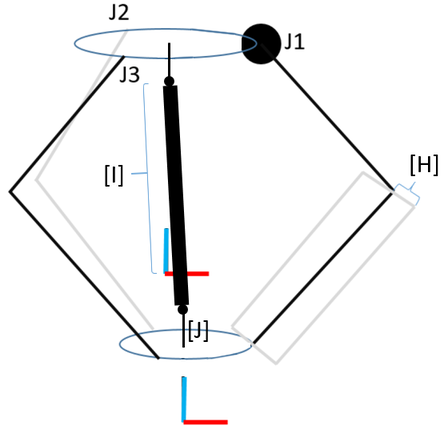
(H) | Half width of parallelograms | Value > 0 |
(I) | Offset base to cardan joint | 3D (XYZ relative to BCS) |
(J) | Offset tool plate to cardan joint | 3D (XYZ relative to LCS 10) |
