Simulation
HINWEIS

Die Simulationsparameter sind für die Anzeige in der 3D-Simulation und für die Physiksimulation relevant. Sie sind nicht relevant für eine korrekte Kinematiktransformation und sind daher im Untermenü "Simulation" des Kinematikmodells angeordnet.
Aktuell können bis zu zwei Teleskopwellen konfiguriert werden. Dazu muss die jeweilige Teleskopwelle aktiviert werden. Anschließend können die Versätze vom Basiskoordinatensystem bzw. der Werkzeugplatte zu den Kardangelenken angegeben werden. Wenn eine Physiksimulation erfolgen soll, sind zusätzlich die Trägheitseigenschaften der Teleskopwellenteile zu parametrieren. Siehe dazu Kapitel Physics (MOVIKIT® Robotics).
|
Parameterbezeichnung | Zusatzinformation | |
|---|---|---|
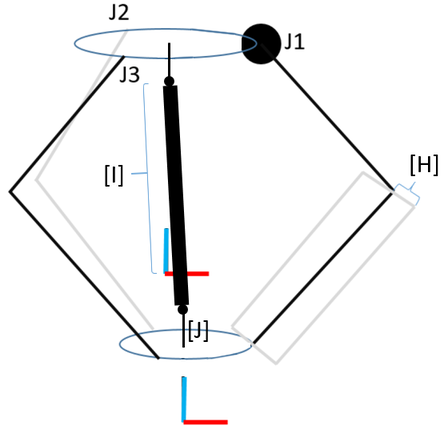
(H) | Halbe Breite der Parallelogramme | Wert > 0 |
(I) | Versatz Basis zu Kardangelenk | 3D (XYZ relativ zum BCS) |
(J) | Versatz Werkzeugplatte zu Kardangelenk | 3D (XYZ relativ zum LCS 10) |
