Physics (MOVIKIT® Robotics)
HINWEIS

Nur bei den Kinematikmodellen sichtbar, die eine Physiksimulation unterstützen. Bei jedem Kinematikmodell ist angegeben, ob es die Physiksimulation unterstützt. Weitere Informationen finden Sie im Kapitel Physiksimulation. Achs-Gelenk-Transformation wird nicht unterstützt.
HINWEIS
Für jede Gelenkachse muss eine Achse mit dem MOVIKIT® MultiMotion und aktivierter "Physiksimulation" unterhalb des "Robotics"-Softwareknoten eingefügt sein. Für die Antriebsprojektierung empfiehlt sich eine virtuelle Achse als Gerät.
Parametergruppe | Beschreibung |
|---|---|
Grundeinstellungen | |
Export in die SEW-Workbench aktivieren | Dem IEC-Projekt die Exportfunktion für die SEW-Workbench hinzufügen. Zum Verwenden der Funktion unter Berücksichtigung eines Vorgeleges oder einer Rotativ- nach Linear-Übersetzung, muss die Funktion "Export in die SEW-Workbench aktivieren" beim MOVIKIT® MultiMotion aktiviert sein. |
Kollisionsreaktion aktivieren | Die Funktion "Kollisionsreaktion" aktivieren (dem IEC-Projekt hinzufügen). Weitere Informationen zur Funktionsweise und zur Inbetriebnahme finden Sie im Kapitel Kollisionserkennung (CollisionDetection). HINWEIS: Zum Verwenden der Funktion muss bei mindestens einer untergeordneten MultiMotion-Achse die Funktion "Kollisionserkennung" aktiviert sein. Siehe Physics (MOVIKIT® MultiMotion). |
Kollisionsreaktion | |
Kollisionsreaktion
HINWEIS: Nur sichtbar, wenn "Kollisionsreaktion aktivieren" aktiviert ist. | Kollisionsreaktion, die nach erkannter Kollision ausgelöst werden soll. Siehe Kapitel Kollisionserkennung (CollisionDetection). - Information - Warnung - Applikationshalt ohne Endstufensperre - Applikationshalt + Endstufensperre - Bahntreuer Not-Halt + Endstufensperre - Achsweiser Notstopp + Endstufensperre |
Abhängig vom gewählten Kinematikmodell werden bei aktivierter Physiksimulation folgende Untermenüs mit spezifischen Einstellungsmöglichkeiten angezeigt:
Für alle Armglieder des gewählten Kinematikmodells müssen die folgenden Trägheitseigenschaften definiert werden.
HINWEIS
Beim TRIPOD_RRR_M10/TRIPOD_RRRR_M10/TRIPOD_RRRRR_M10 müssen alle drei Oberarme und alle sechs Unterarme die jeweils identischen Massen, Schwerpunkte und Trägheiten aufweisen. Die Schaltfläche "Armeigenschaften kopieren" erleichtert dabei die korrekte Parametrierung.
Parameterbezeichnung | Beschreibung |
|---|---|
[Kinematikmodell] - Trägheitseigenschaften | |
Masse | Masse des Armgliedes. |
Schwerpunkt (X, Y, Z) | Schwerpunkt des Armgliedes. X, Y und Z beziehen sich auf das LCS (Link Coordinate System) des Armgliedes. |
Trägheit (XX, YY, ZZ, XY, XZ, ZX) | Trägheitsmatrix um den Schwerpunkt. X, Y und Z beziehen sich auf das LCS (Link Coordinate System) des Armgliedes. |
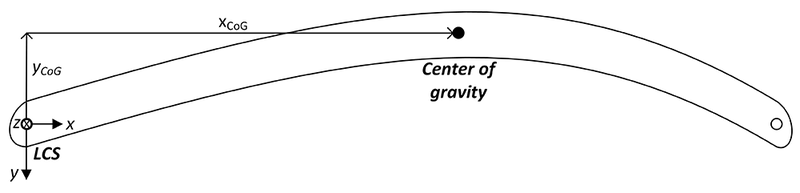
Der Ursprung des LCS (Link Coordinate System) jedes Armgliedes liegt am Anfang des Armglieds im Gelenk (siehe Abbildung). Die Z-Achse zeigt in positive Achs-Richtung. Die x-Richtung zeigt in der Regel zum nächsten Gelenk.
Die LCS aller Kinematikmodelle sind im Kapitel Funktionsbeschreibung beim jeweiligen Kinematikmodell dargestellt und können auch in der 3D-Simulation eingeblendet werden.
Für folgende Kinematikmodelle gibt es zudem Besonderheiten und spezifische Konfigurationsparameter.
Parameterbezeichnung | Beschreibung |
|---|---|
ROLLER GANTRY: Allgemeine Einstellungen | |
Manuelle Vorgabe der Riemenvorspannung |
|
Riemenvorspannung | Riemenvorspannung. Nur wirksam, wenn die manuelle Vorgabe der Riemenvorspannung aktiviert ist. |
ROLLER_GANTRY_RR_M10: Trägheitseigenschaften | |
Riemenräder: Trägheit | Trägheitsmoment aller Riemenräder zusammen |
Riemen: Trägheit | Trägheitsmoment des Riemens Kann berechnet werden aus |
1. Kartesisches Glied: Masse | Masse des ersten kartesischen Gelenkes, das nur in eine Richtung bewegt werden kann:
|
2. Kartesisches Glied: Masse | Masse des zweiten kartesischen Gelenkes, das in zwei Richtungen bewegt werden kann:
|
Der Roboter kann am TCP mit einem Werkstück zur Laufzeit beladen werden. Für die Berücksichtigung in der Physiksimulation können die Trägheitseigenschaften im Untermenü "Workpiece Settings" konfiguriert werden.
Wurden beim TRIPOD_RRR_M10/ TRIPOD_RRRR_M10/ TRIPOD_RRRR_M10 in den Einstellungen des Kinematikmodells Teleskopwellen aktiviert, müssen auch die Trägheitseigenschaften (Masse, Schwerpunkt (X, Y, Z) und Trägheit (XX, YY, ZZ, XY, XZ, YZ)) der beiden Teleskopwellenteile, sowie die Reibung zwischen den Teleskopwellenteilen parametriert werden. Diese Eigenschaften werden in den Untermenüs parametriert, die eingeblendet werden, wenn Teleskopwellen im Untermenü "Simulation" des Kinematikmodells aktiviert wurden. Sind keine Reibwerte bekannt, kann die Reibung im Betrieb, wie im Kapitel Physiksimulation im MOVIKIT® MultiMotion in Betrieb nehmen beschrieben, ermittelt werden. HINWEIS: Das Simulieren der Antriebsmomente für den Rotationsantrieb um A ist aktuell nicht möglich.
Parameterbezeichnung | Beschreibung |
|---|---|
Werkstückeinstellungen | |
Masse | Masse des Werkstücks |
Schwerpunkt (X, Y, Z) | Schwerpunkt des Werkstücks. X, Y und Z beziehen sich auf das TCS (Tool Coordinate System) des Roboters. |
Trägheit | Trägheitsmatrix um den Schwerpunkt. X, Y und Z beziehen sich auf das TCS (Tool Coordinate System) des Roboters. |
