Wickelachse zu Lineargelenk
Bei diesem Kurbeltyp wird die Bewegung einer rotativen Einzelachse in die Bewegung einer linearen Gelenkachse übertragen. Insbesondere wird z. B. ein Riemen übereinander auf die Einzelachse aufgewickelt, so dass sich der effektive Durchmesser der rotativen Einzelachse während der Drehung verändert.
|
Beispiel
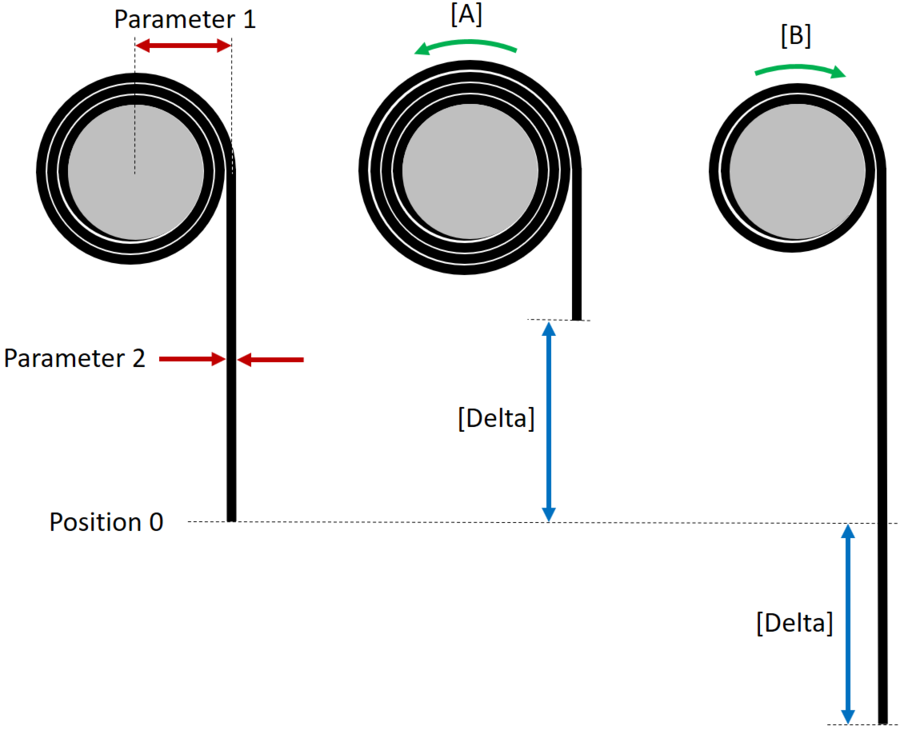
Im abgebildeten Beispiel ist links die Nullstellung der Achse dargestellt, mit Parameter 1 als effektivem Radius in dieser Stellung und Parameter 2 als Dicke des Wickelmaterials.
In Fall [A] nimmt der effektive Radius in positiver Drehrichtung (grüner Pfeil) zu. Die positive Bewegungsrichtung der linearen Gelenkachse zeigt in dem Fall in der Abbildung nach oben.
In Fall [B] nimmt der effektive Radius in positiver Drehrichtung (grüner Pfeil) ab. Die positive Bewegungsrichtung der linearen Gelenkachse zeigt in dem Fall in der Abbildung nach unten.
Parametrierung
Parameter | Beschreibung |
|---|---|
Kurbeln | |
Einzelachse | Index von Einzelachse und Gelenkachse, zwischen denen die Kurbel wirkt (Für die 1. Achse muss der Wert 1 eingegeben werden). |
Parameter 1 | Nur verwendet, wenn Parameter 8 = 0 oder 1 Effektiver Radius der rotativen Einzelachse in der Nullstellung der Achse |
Parameter 2 | Nur verwendet, wenn Parameter 8 = 0 Dicke des gewickelten Materials
|
Parameter 3..7 | Partiell verwendet, wenn Parameter 8 ≠ 0 |
Parameter 8 | Kennzeichnung der Eingabe von Parametern |
Inbetriebnahme
Die rotative Einzelachse muss im Antriebsstrang mit der Einheit Grad [°] konfiguriert werden (obwohl eine lineare Gelenkachse des ausgewählten Kinematikmodells angetrieben wird). Die Umrechnung von der rotativen Einzelachse in eine lineare Gelenkachse erfolgt durch die Kurbel.
Die Software-Endschalter müssen so eingestellt sein, dass das Wickelmaterial nicht weiter abgewickelt wird als mechanisch möglich. Für die korrekte Funktion der Software-Endschalter der Gelenkachsen und der kartesischen Achsen im Softwaremodul, müssen die Parameter gemäß folgender Beschreibung korrekt eingestellt sein.
Wenn die erforderlichen Parameter 1 und 2 bekannt sind, werden diese einfach eingegeben. Hierzu muss in Parameter 8 der Wert 0 eingegeben werden.
Wenn jedoch Unsicherheiten bestehen und eine hohe Genauigkeit erzielt werden soll (insbesondere zur Berücksichtigung der Längung und Verringerung der Dicke des Wickelmaterials unter Last), lässt sich die Kurbel gemäß der im Folgenden beschriebenen Vorgehensweisen auf verschiedene Arten vermessen. In allen Varianten können Sie die effektiv verwendeten Parameter 1 (effektiver Radius in Nullstellung) und Parameter 2 (Dicke des gewickelten Materials) zu Diagnosezwecken nach Aktualisierung der Konfigurationsdaten und Start des MOVI-C® CONTROLLER im IEC-Editor auslesen ("MyRobot" entspricht dem vom Anwender in MOVISUITE® vergebenen Namen des Roboterknotens):
SEW_GVL_Internal.MyRobot.fbAxisJointTransformation.
stOut.stConfig.astCrank[Index].alrPar[1 bzw. 2]
