Linearachse zu Drehgelenk
Bei diesem Kurbeltyp wird die Bewegung einer linearen Einzelachse in die Bewegung einer rotativen Gelenkachse übertragen.
Die Kurbel wird über den Index der Achse sowie 4 Parameter konfiguriert.
Parametrierung
Parameter | Beschreibung |
|---|---|
Gelenkachse | Index von Einzelachse und Gelenkachse, zwischen denen die Kurbel wirkt (Für die 1. Achse muss der Wert 1 eingegeben werden.) |
Parameter 1 | Versatz, ausgehend von der rotativen Gelenkachse, entlang des Roboterarmsegments, der um die rotative Gelenkachse gedreht wird, hin zum Scharniergelenk zwischen linearer Einzelachse und Roboterarmsegment (Parameter 1 <> 0) |
Parameter 2 | Zusätzlicher Versatz, senkrecht zum Roboterarmsegment, in der Bewegungsebene des Roboterarmsegments, hin zum Scharniergelenk zwischen linearer Einzelachse und Roboterarm |
Parameter 3 | Versatz, ausgehend von der rotativen Gelenkachse, entlang der Achse des Roboterarmsegments bei Gelenkachswert 0°, hin zum Scharniergelenk zwischen der Verankerung und der linearen Einzelachse. (Parameter 3 < 0) |
Parameter 4 | Zusätzlicher Versatz, senkrecht zur Achse von Parameter 3, in Bewegungsebene des Roboterarms, hin zum Scharniergelenk zwischen der Verankerung und der linearen Einzelachse |
Parameter 5..8 | nicht verwendet |
In Abhängigkeit zum Vorzeichen von Parameter 1 und Parameter 2 bzw. 4 werden hinsichtlich der Stellung von linearer Einzelachse und Roboterarmsegment die im Folgenden dargestellten 4 Fälle unterschieden.
Bei positivem Parameter 1 ist das Scharniergelenk zwischen linearer Einzelachse und Roboterarmsegment von der rotativen Gelenkachse aus betrachtet entlang der kinematischen Kette in Richtung des Roboterflansches platziert. Bei negativem Parameter 1 hingegen ist das Scharniergelenk an einer Verlängerung des Roboterarmsegments von der rotativen Gelenkachse aus betrachtet in Richtung der Roboterbasis platziert.
Die resultierende Kurbel kann maximal in einem Winkelbereich von 180° bewegt werden, wobei die Grenzwerte nicht anzufahren sind. Der Bereich ergibt sich durch Bewegung der linearen Einzelachse zwischen der minimal und maximal möglichen Position, also Länge der Einzelachse. Ein Wechsel über die Stauchung oder Streckung der Kurbel hinweg in den gegenüberliegenden Bereich wird nicht unterstützt. Bei der Montage und Inbetriebnahme ist darauf zu achten, dass sich der Roboter in der mit den konfigurierten Parametern unterstützten Stellung befindet.
Die lineare Einzelachse muss bei der Inbetriebnahme mittels eines Referenzoffsets derart referenziert werden, dass ihre Position der Länge zwischen den beiden Scharniergelenken entspricht.
Parameter 1 > 0 und Parameter 2 ≥ 0
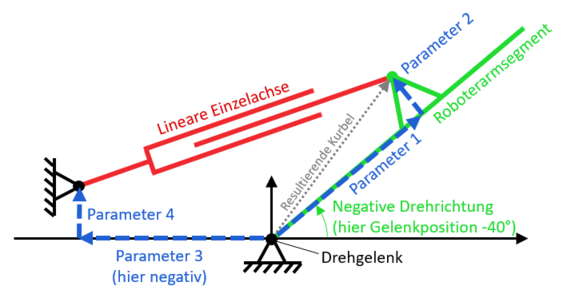
Im diesem Fall sind Parameter 1 und 2 positiv, Parameter 3 ist negativ. Da Parameter 2 positiv ist, bewegt sich die lineare Einzelachse in der Abbildung oberhalb der rotativen Gelenkachse. Dieses Verhalten ist unabhängig vom Vorzeichen von Parameter 4, der im abgebildeten Beispiel positiv ist.
Das Roboterarmsegment hat in dem Beispiel den Gelenkachswert -40°. Zeigt das Roboterarmsegment in Richtung der ersten Koordinatenachse, also in der Abbildung horizontal nach rechts, hat es den Gelenkachswert 0°. Zeigt das Roboterarmsegment z. B. senkrecht nach oben, hat es den Gelenkachswert -90°. Zeigt es z. B. senkrecht nach unten, hat es den Gelenkachswert 90°. Die lineare Einzelachse müsste also zum Anfahren von z. B. 0° gegenüber der Stellung in der Abbildung verlängert und zum Anfahren von z. B. -90° verkürzt werden.
Parameter 1 > 0 und Parameter 2 < 0
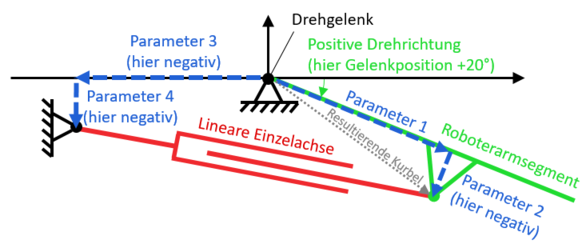
In diesem Fall ist Parameter 1 positiv, die Parameter 2 und 3 sind negativ. Da Parameter 2 negativ ist, bewegt sich die lineare Einzelachse in der Abbildung unterhalb der rotativen Gelenkachse. Dieses Verhalten ist unabhängig vom Vorzeichen von Parameter 4, der im abgebildeten Beispiel negativ ist.
Parameter 1 < 0 und Parameter 4 ≥ 0
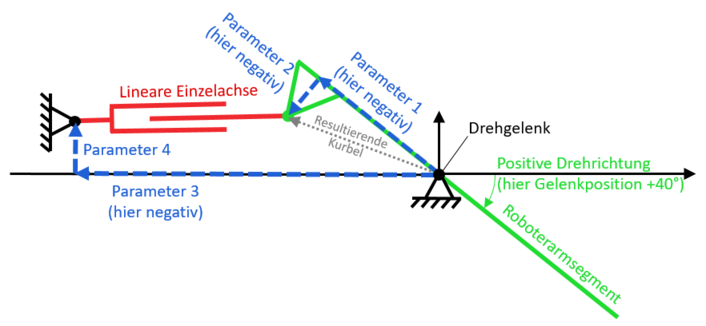
In diesem Fall sind die Parameter 1 und 3 negativ, Parameter 4 ist positiv. Da Parameter 4 positiv ist, bewegt sich die lineare Einzelachse in der Abbildung oberhalb der rotativen Gelenkachse. Dieses Verhalten ist unabhängig vom Vorzeichen von Parameter 2, der im abgebildeten Beispiel negativ ist.
Parameter 1 < 0 und Parameter 4 < 0
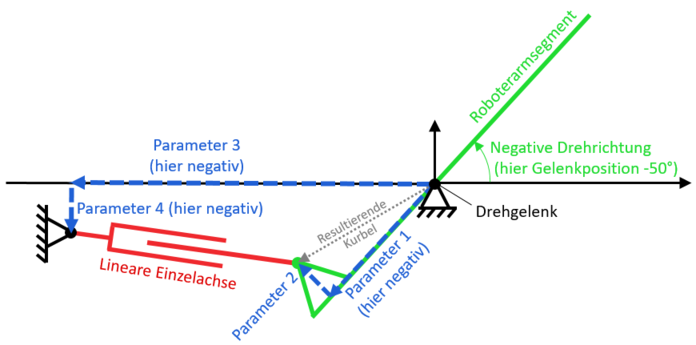
In diesem Fall sind die Parameter 1, 3 und 4 negativ. Da Parameter 4 negativ ist, bewegt sich die lineare Einzelachse in der Abbildung unterhalb der rotativen Gelenkachse. Dieses Verhalten ist unabhängig vom Vorzeichen von Parameter 2, der im abgebildeten Beispiel positiv ist.
