Unerwartetes Verhalten bei der Verarbeitung von Ruck-Vorgaben
Die in den folgenden Kapiteln beschriebenen zeitbasierten Betriebsarten Geschwindigkeitsvorgabe (Velocity), Absolute Positionierung (Positioning), Relative Positionierung (PositioningRelative), Tippen (Jog) und Referenzfahrt (Homing) ermöglichen das direkte Steuern des Rucks über die Variable lrJerk. In diesem Kapitel sind Szenarien beschrieben, bei denen es insbesondere beim Umschalten von einem großen auf einen kleinen Ruck in bestimmten Phasen der Bewegung zu unerwartetem Verhalten der betreffenden Achse kommen kann.
ACHTUNG

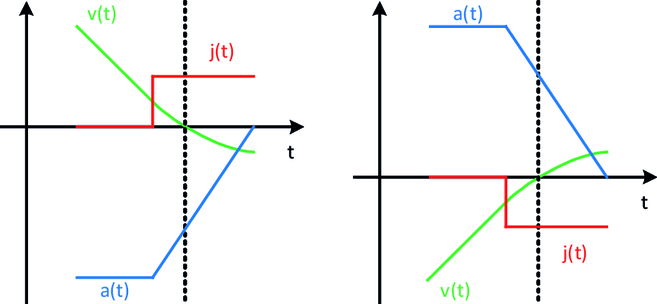
Unerwartetes Anlagenverhalten durch Reversieren des Antriebs insbesondere beim Umschalten von einem großen auf einen kleinen Ruck in bestimmten Phasen der Bewegung. Der Anwender trägt die Verantwortung dafür, dass die konfigurierte Ansteuerung der Profilgeneration nicht zu einem unerwarteten Verhalten führt.
Tod, schwere Verletzungen, Sachschaden
- Überprüfen Sie, welche Auswirkungen ein unerwartetes Reversieren des Antriebs in Ihrer Applikation hätte. Behandeln Sie zum Verhindern eines unerwarteten Reversierens des Antriebs, den vorgegebenen Ruck wie eine einmalig konfigurierte Größe oder verändern Sie ihn nur, wenn die aktuell wirksame Beschleunigung annähernd den Wert "0" hat.
Weiterführende Informationen