Importing G-code
G-code is imported via a dialog window that can be opened in the tab for creating an SRL program. See also [2] in chapter Creating programs. While the dialog window is open, you can continue to use the RobotMonitor and edit the SRL program.
Proceed as follows to import G-code:
- In the SRL program creation tab in RobotMonitor, open the menu with the additional functions for program editing [2] and click [Import G-code file from PC].
- The "Import G-code" dialog window is displayed.
- Configure the import using the configuration fields described below and afterwards click [Start Import].
INFORMATION
To start the import, at least one existing G-code file must be selected. You cannot close the dialog window and restart the import process as long as the import process is ongoing. To close the dialog window or restart the import, the currently ongoing import must be canceled in the RobotMonitor window.

[1] | Select G-code file (you can select files with any file ending) |
[2] | Define the G-code dialect |
[3] | Optionally define a scaling factor for the translational coordinates (X, Y, Z) and for the circle center (I, J, K). The function can also be used for conversion into other measurement units (e.g. inch to mm). |
[4] | Optionally define a scaling factor for rotational coordinates (A, B, C). The function can also be used for conversion into other measurement units (e.g. inch to mm). |
[5] | Optionally define a scaling factor for all speed and feed settings (in the ISO code letter F). This factor can, for instance, be used to convert the speed unit used by G-code into the unit used by robotics, e.g. inch/s to mm/s |
[6] | Activates the insertion of a SET_MOTIONSET command for selecting the motion parameter sets (MotionSets) at the beginning of the SRL program when importing the G-code. MotionSets are a specific property of the software module without a G-code equivalent. This setting should be activated if the imported G-code is intended to be a standalone executable. |
[7] | Select a preconfigured MotionSet |
[8] | Activates the insertion of a SET_BLENDING_PARA command for defining the blending distance at the beginning of the SRL program when importing the G-code. Configuring the blending distance is a specific property of the software module without a G-code equivalent. This setting should be activated if it is intended for the imported G-code to use the blending (path control operation). In the basic state of the interpreter, blending is switched on, a blending distance of 0 mm and also the other default settings for blending are set. See also Establishing the basic state. Only the blending can be activated or deactivated in the G-code using the corresponding commands. A command to change the blending distance does not exist in the G-code. |
[9] | Define the blending distance |
[10] | Output (information, warnings, errors) of the G-code importer |
Scaling example
The "G01 X50 Y50 Z50 C50" command with "Translation coordinate scaling factor" = 2 and "Rotation coordinate scaling factor" = 4 is converted into the following LIN command with scaled coordinates:

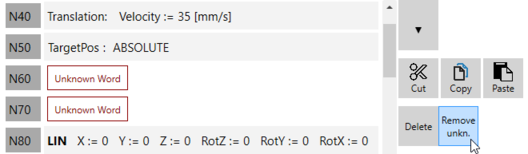
Unsupported commands
Commands that are not supported by G-code import and therefore cannot be imported are displayed as "Unknown Word" in the SRL program. These commands must be erased from the program before being executed; otherwise, an error will occur.
Large G-code files
The G-code import supports files with a size of up to 2 MB. For large G-code programs that do not fit in a standard program, additional programs can be created in addition to the 20 standard programs. They can be configured larger than a standard program. The number and size of these additional programs are limited by the free RAM of the MOVI-C® CONTROLLER. For further information, refer to chapter Managing additional/large SRL programs.
