Referencing an axis group
This chapter describes the referencing of an axis group controlled by the software module.
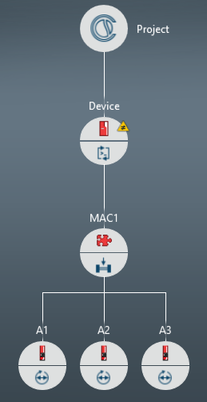
Referencing is based on the following project structure:
Referencing follows the following procedure:
- Wait for referencing of the axis group to start. The system always skips to this step after the sequence of steps has completed.
- Query as to whether referencing of the motor encoder has been configured. If this is the case, step 3 is carried out. If this is not the case, the system skips to step 4.
- Reference the motor encoders of the axis group members. In the example project, the motor encoders of axis group members "A1", "A2", and "A3" would be referenced if "SuperAxisGroup" referencing was selected. A decentralized referencing (FCB12) of type "Referencing without reference travel" is carried out.
- Using the reference travel type selected, carry out the profile generation of the axis group.
- Query as to whether alignment of the axis group members has been configured. If this is the case, step 6 is carried out. If this is not the case, the system skips to step 7. INFORMATION: Only possible with two axis group members and in the reference travel types "Positive limit switch" and "Negative limit switch". Applied to the example project, this means that the only axis groups aligned are the "ASide" and "BSide" axis groups. The individual axis group members "A1" and "A2" are not simultaneously aligned when "SuperAxisGroup" referencing is selected.
- Align the subordinate group members. Depending on the logical operations of the limit switches, either the "ASide" or the "BSide" is aligned. With a logical AND operation, the group member aligned is the one that has not yet left its limit switch. With an OR operation, the group member aligned is the one that has not yet reached its limit switch.
- Query as to whether referencing of the motor encoder has been configured. If this is the case, step 8 is carried out. If this is not the case, the system skips to step 9.
- Reference the motor encoders of the axis group members. In the example project, the motor encoders of axis group members "A1", "A2", and "A3" would be referenced if "SuperAxisGroup" referencing was selected. A decentralized referencing (FCB12) of type "Referencing without reference travel" is carried out.
- Reference the profile generator of the axis group using reference travel type "Referencing without reference travel". This is followed by the system traveling to its home position.
|

|