Modulbeschreibung
Das MOVIKIT® MultiAxisController ist ein Softwaremodul für MOVI-C® CONTROLLER zum Realisieren mechanisch gekoppelter Antriebe (lose oder starre Kopplung). Die Kopplung kann dabei dauerhaft über die mechanische Konstruktion (Verbindung über Wellen, Hubwagen, Portale, Rad/Schiene) oder zeitweise über das Produkt (Extruder, Blechabwicklung vom Coil) vorliegen. Die Kopplung kann zudem mehrere Antriebe umfassen.
Die Kernfunktion des Softwaremoduls besteht darin, mit mehreren Antrieben eine Last gemeinsam anzutreiben. Dabei werden die Antriebe so aufeinander abgestimmt, dass keine Schwingungen, die zum Ausfall der Anlage führen könnten, entstehen. Klassische Master-Slave-Anbindungen sind für diesen Anwendungsfall nicht geeignet oder nur mit Expertenwissen beherrschbar. Das Softwaremodul bricht diese Master-Slave-Anordnung auf und behandelt jeden Antrieb auf gleicher Ebene. Somit fallen bei der Master-Slave-Anordnung anfallende Totzeiten weg und es wird eine höhere Dynamik erzielt.
|
|
Da das Softwaremodul als Funktion innerhalb einer Achsgruppe arbeitet, werden folgende Funktionen einfach gelöst:
- Verarbeitung von Mehrachs-Endschaltern
- Mehrachs-Referenzfahrt
- Mehrachs-Tippbetrieb
- Mehrachs-Fehlerbehandlung
- Mehrachs-Ausrichtung nach einem Fehlerfall
Diese Funktionen sind Bestandteil des Softwaremoduls und müssen nicht bei jeder Anwendung neu programmiert werden. Dies spart Zeit bei der Inbetriebnahme.
Darüber hinaus bietet das Softwaremodul folgende Funktionen:
- Lastenaufteilung
- Die Lastenaufteilung ist für Anwendungen vorgesehen, bei denen eine ungleichmäßige Aufteilung der Last auf die Teilnehmer erfolgen soll. Dies kann ein dynamischer Raddruck sein, hervorgerufen durch eine Massenbeschleunigung oder statisch durch unterschiedliche Beladung. Die Aufteilung kann dynamisch verändert werden. Der Vorteil kann z. B. eine höhere Beschleunigung sein, was wiederum die Taktzeit reduziert.
- Antischlupfregelung
- Dies erhöht in der Antriebsart Rad/Schiene die Anlagenverfügbarkeit. Ein Schlupf des Antriebsrads kann zum Abschalten der Anlage führen, im schlimmeren Fall wird ein Rad oder die Schiene beschädigt. Der Grund dafür kann Dreck oder eine ölige Stelle auf der Schiene sein. Die Antischlupfregelung erkennt den Schlupf, begrenzt ihn an einer parametrierbaren Grenze und setzt als Hinweis für den Anwender ein entsprechendes Bit. Wenn das Rad dann wieder Haftung hat, fährt der Antrieb weiter, ohne die Mechanik zu beschädigen.
- Elektronisches Differenzial
- Das elektronische Differenzial kommt dann zum Einsatz, wenn ein mobiles System um die Kurve fahren soll. Ein Antrieb erfährt dabei eine Geschwindigkeitsüberhöhung und ein anderer Antrieb eine Geschwindigkeitsminderung. Das Softwaremodul hält dann das System auf einer mittleren Geschwindigkeit.
Zum Abbilden der verschiedenen Anwendungen bietet das Softwaremodul folgende Betriebsarten:
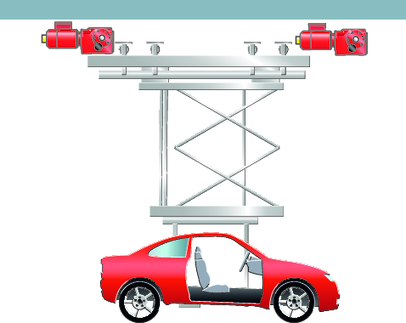
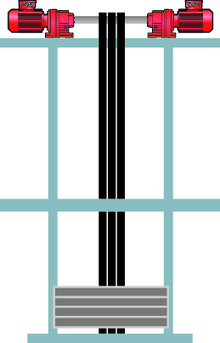
- Betriebsart "Priorität Schrägstellung"
- Diese Betriebsart ist für Anwendungen, bei der eine Schiefstellung der Konstruktion zu Problemen führt. Dies kann zu Fehlpositionierungen oder Überlastung mit anschließender Abschaltung führen.
- Anwendungsbeispiele sind Hallenkrane, Parallelvorschübe, RBG-Hubwerke und Doppelsäulenheber.
- Betriebsart "Priorität Drehmoment"
- Diese Betriebsart ist für Anwendungen, bei der die Regelung des Drehmoments im Vordergrund steht. Wichtige Aufgaben der Regelung sind hier, Schlupf bis zu einer parametrierbaren Größe zuzulassen, aber den maximalen Schlupf zu begrenzen (Antischlupfregelung).
- Außerdem kann es vorkommen, dass nicht alle Antriebe positionsabhängig den gleichen Weg zurückzulegen. Dies ist z. B. bei einer Kurvenfahrt der Fall. Dafür wurde das Softwaremodul um ein elektronisches Differenzial mit Sperrfunktion erweitert.
- Auch eine Lastaufteilung ist integriert, die einstellbar über Prozessdaten Drehmomente auf die einzelnen Antriebe dynamisch verteilen kann. Mit dieser Funktion können auch Antriebe bewusst gegeneinander verspannt werden, um z. B. Spiel zu eliminieren.
- Auch die Kompensation von Durchmesserfehlern ist damit realisierbar.
- Anwendungsbeispiele sind traktionsoptimierte Fahrzeuge, RBG-Fahrantriebe, Kurvengänger (in Vorbereitung), ausfallsichere redundante Antriebssysteme, glatte oder schlechte Fahrbahnen sowie Takttische.
Das Softwaremodul kann in Kombination mit weiteren MOVIKIT®-Softwaremodulen z. B. bei einem Doppelfahrwerk in einem Regalbediengerät eingesetzt werden.
Außerdem ist es möglich, das Softwaremodul verschachtelt in beiden Betriebsarten zu verwenden. Ein Beispiel hierfür wäre ein Portalkran, der rechts und links mehrere Antriebe besitzt. Hier würde überlagert die Betriebsart "Priorität Schrägstellung" das Portal regeln und unterlagert eine Gruppe rechts und eine Gruppe links die Betriebsart "Priorität Drehmoment" anwenden.
Zudem besteht die Möglichkeit den Funktionsumfang der Softwaremodule durch Add-ons zu erweitern. Weitere Informationen dazu finden Sie im Kapitel Add-ons.
