Coding of process data
The same process data information is used for control and setpoint input in all fieldbus systems. The coding of the process data takes place according to the uniform MOVILINK® profile for SEW drive inverters.
MOVIMOT® is available in the following variants:
- 2 process data words (2 PD)
- 3 process data words (3 PD)
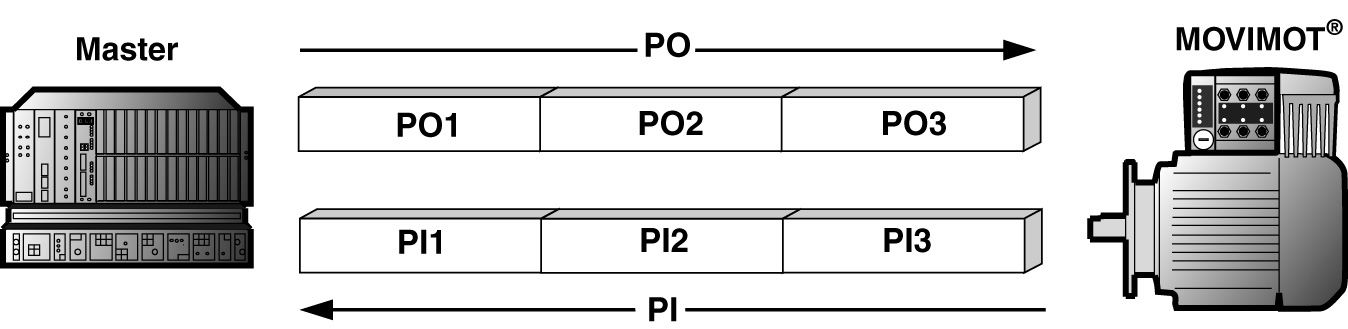
PO | = Process output data | PI | = Process input data |
PO1 | = Control word | PI1 | = Status word 1 |
PO2 | = Speed [%] | PI2 | = Output current |
PO3 | = Ramp | PI3 | = Status word 2 |
Additional information





