MIXED_LRL_M10
Enthalten in der Lizenz MOVIKIT® Robotics addon MediumModels.
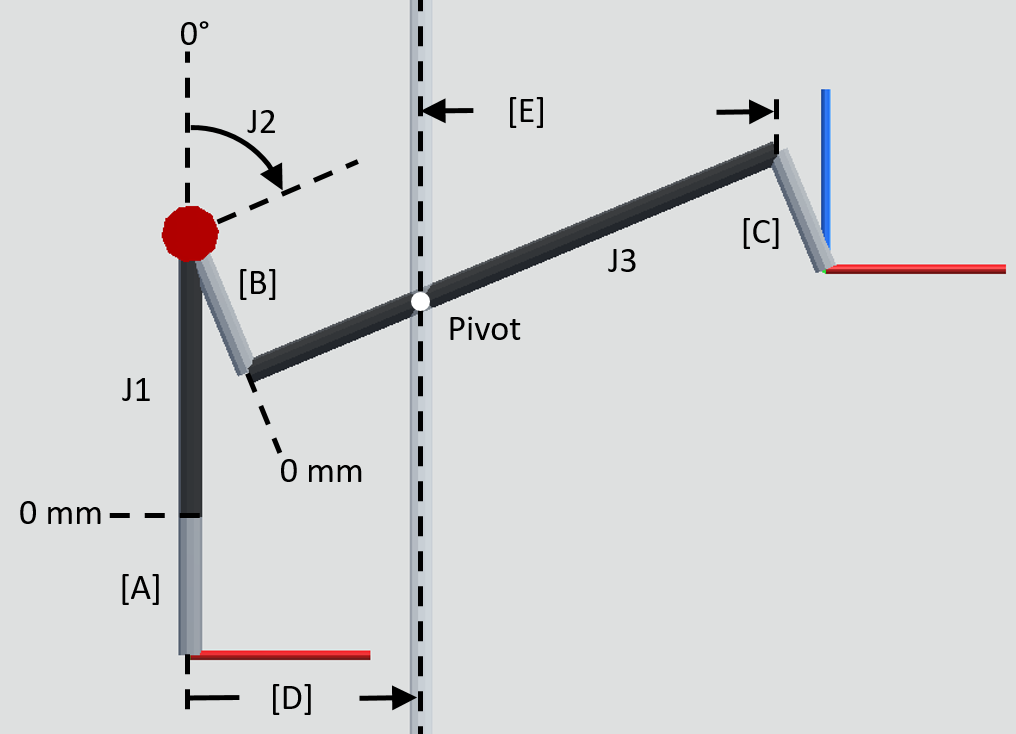
Ein MIXED-Kinematikmodell mit 2 Linearachsen und 1 Drehachse, das translatorische Bewegungen des Flansches in der ZX-Ebene ermöglicht.
- Gelenkachse 1: Z-Richtung
- Gelenkachse 2: Drehung um Achse parallel zur Y-Achse
- Gelenkachse 3: Linearachse in ZX-Ebene
Berücksichtigen Sie beim Verwenden dieses Kinematikmodells folgende Hinweise:
- Die Orientierung des Flansches wird mit einem Parallelogramm oder Riemen konstant gehalten.
- Bei JOG_AXIS/JOINT und PTP zu Gelenkachswerten werden alle 3 Einzel-/Gelenkachsen wie vorgegeben verfahren.
- Bei JOG_CART/LIN/CIRC und PTP zu einer kartesischen Position wird der Schnittpunkt der Linie durch die Gelenkachse 3 mit einer Pivot-Achse, die parallel zur Y-Achse verläuft, konstant gehalten. Die X-Koordinate der Pivot-Achse ist durch den Parameter (D) festgelegt. Die Z-Koordinate der Pivot-Achse bleibt bei JOG_CART/LIN/CIRC und PTP zu einer kartesischen Position konstant.
Weiterführende Informationen