Parameter
Parameterbezeichnung | Zusatzinformation | |
|---|---|---|
Kinematikparameter | ||
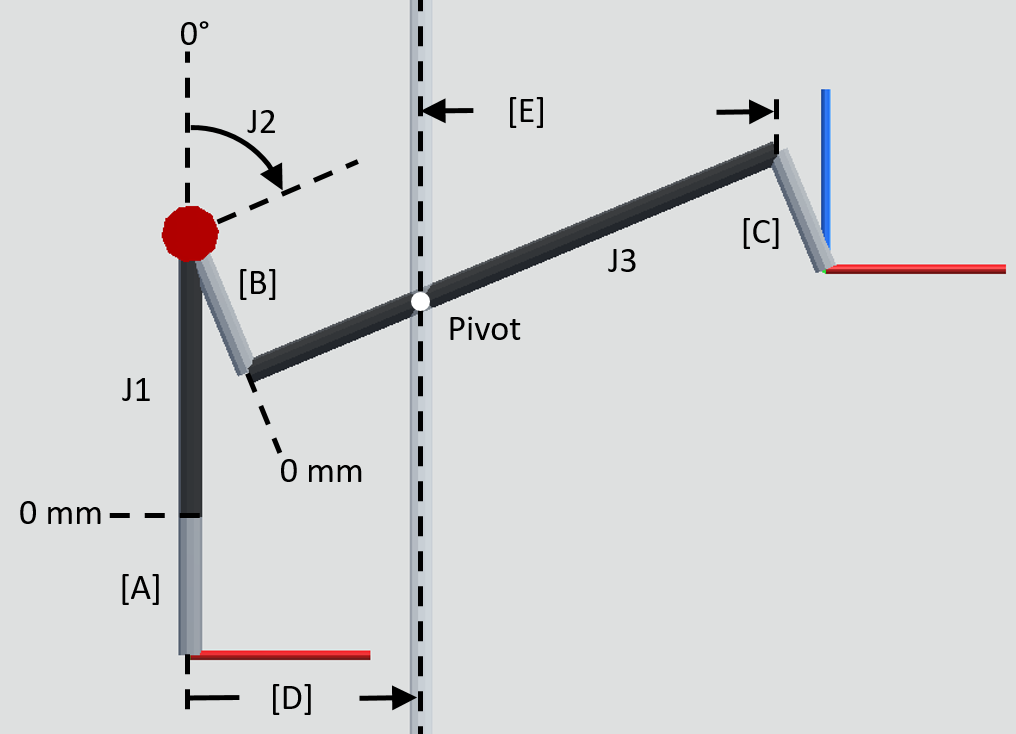
(A) | Versatz zu Gelenk 1 (Z) | |
(B) | Versatz Gelenk 2 zu Gelenk 3 | Versatz senkrecht zu Gelenkachse 3 In X-Richtung, wenn Gelenkachse 2 = 0° |
(C) | Versatz Gelenk 3 zum Flansch | Versatz senkrecht zu Gelenkachse 3 In X-Richtung, wenn Gelenkachse 2 = 0° |
(D) | Versatz zur Pivot-Ebene (X) | X-Koordinate der Pivot-Ebene, welche die YZ-Ebene ist, in welcher der Schnittpunkt mit der Geraden durch Gelenkachse 3 bei kartesischer Interpolation in der Pivot-Achse konstant gehalten wird |
HINWEIS: Sind (B) und (D) beide gleich 0, dann werden bei kartesicher Interpolation (JOG_CART, LIN, CIRC) nur die Gelenkachsen 2 und 3 bewegt. Die Pivot-Achse befindet sich in dem Fall im Gelenk 2. Ist (B) ungleich 0 oder (D) ungleich 0, dann wird bei kartesischer Interpolation auch Gelenkachse 1 bewegt, damit die Linie durch die Gelenkachse 3 um die Pivot-Achse schwenkt.
