MIXED_LRL_M10
Included in the MOVIKIT® Robotics addon MediumModels license.
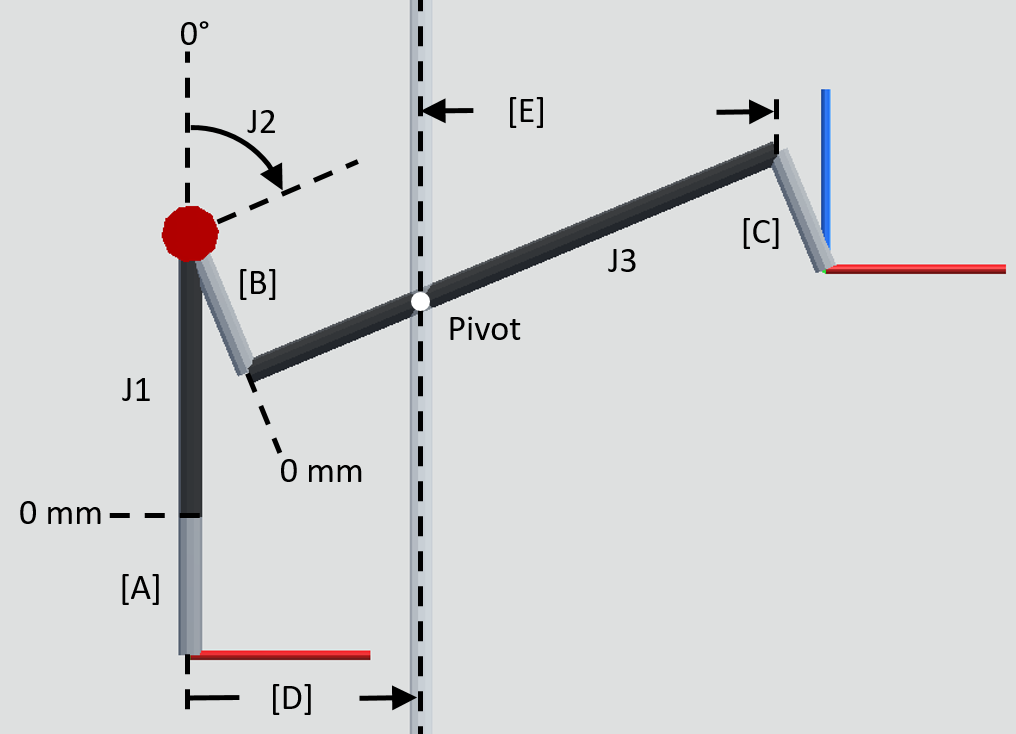
A MIXED kinematic model with 2 linear axes and 1 rotary axis that enables translational movements of the flange in the ZX plane.
- Joint axis 1: Z direction
- Joint axis 2: Rotation around an axis parallel to the Y-axis.
- Joint axis 3: Linear axis in ZX plane
Observe the following information when using this kinematic model:
- The orientation of the flange is kept constant with a parallelogram or belt.
- With JOG_AXIS/JOINT and PTP to joint axis values, all 3 single/joint axes are moved as specified.
- With JOG_CART/LIN/CIRC and PTP to a Cartesian position, the intersection of the line through joint axis 3 with a pivot axis running parallel to the Y-axis is kept constant. The X coordinate of the pivot axis is defined by the parameter (D). The Z coordinate of the pivot axis remains constant with JOG_CART/LIN/CIRC and PTP to a Cartesian position.
Additional information