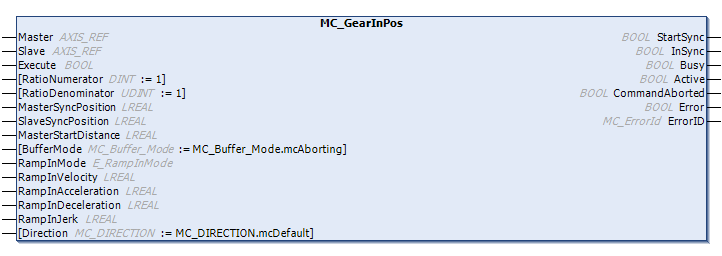
MC_GearInPos
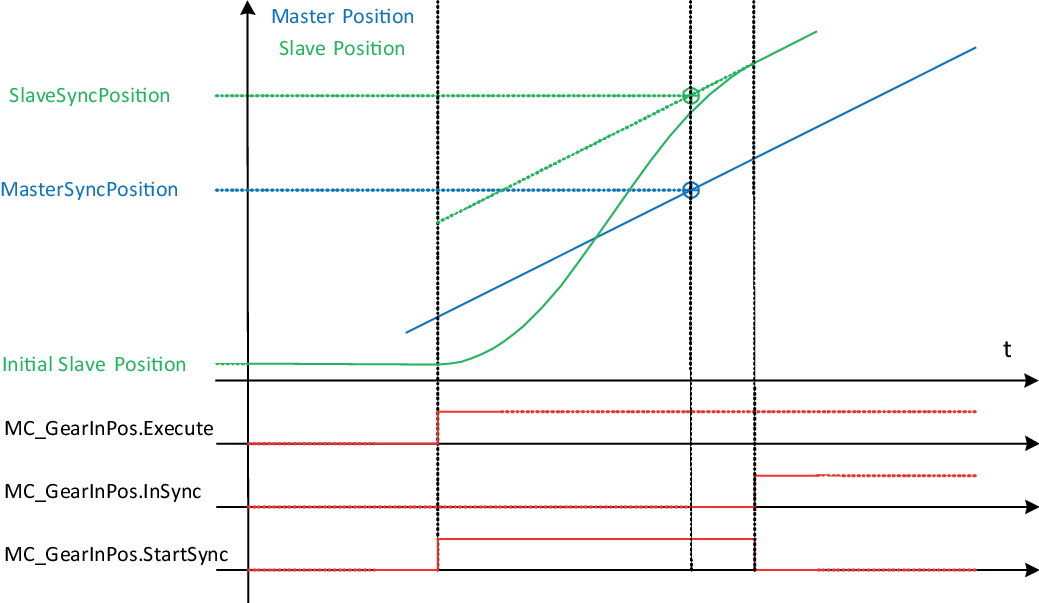
Dieser Funktionsbaustein kuppelt eine Slave-Achse auf einer bestimmten Position einer Master-Achse ein. Das Geschwindigkeitsverhältnis zwischen Slave- und Master-Achse kann dabei angegeben werden.
Ein Anwendungsbeispiel dazu finden Sie im Kapitel Slave-Achse auf einer bestimmten Position einer Master-Achse einkuppeln.
VAR_IN_OUT
Variablenname | Datentyp | Beschreibung |
|---|---|---|
Master | AXIS_REF | Verweis auf ein logisches Gerät Siehe dazu auch AXIS_REF. |
Slave | AXIS_REF | Verweis auf ein logisches Gerät Siehe dazu auch AXIS_REF. |
VAR_INPUT
Variablenname | Datentyp | Beschreibung |
|---|---|---|
Execute | BOOL | Ausführung des Funktionsbausteins starten. |
RatioNumerator | DINT | Zähler Übersetzungsverhältnis Master-Slave |
RatioDenominator | DINT | Nenner Übersetzungsverhältnis Master-Slave |
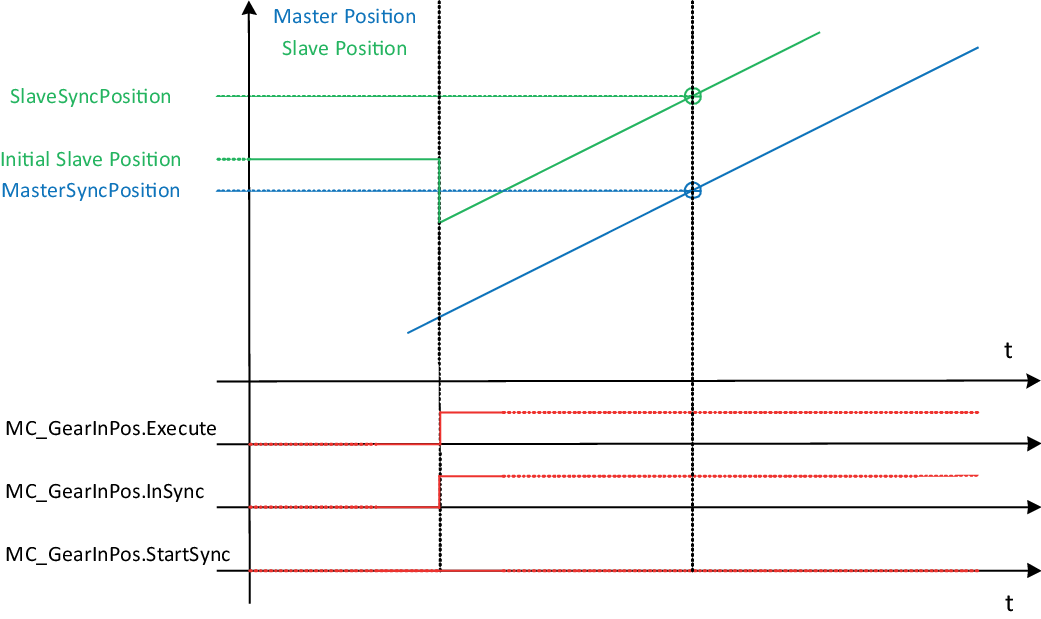
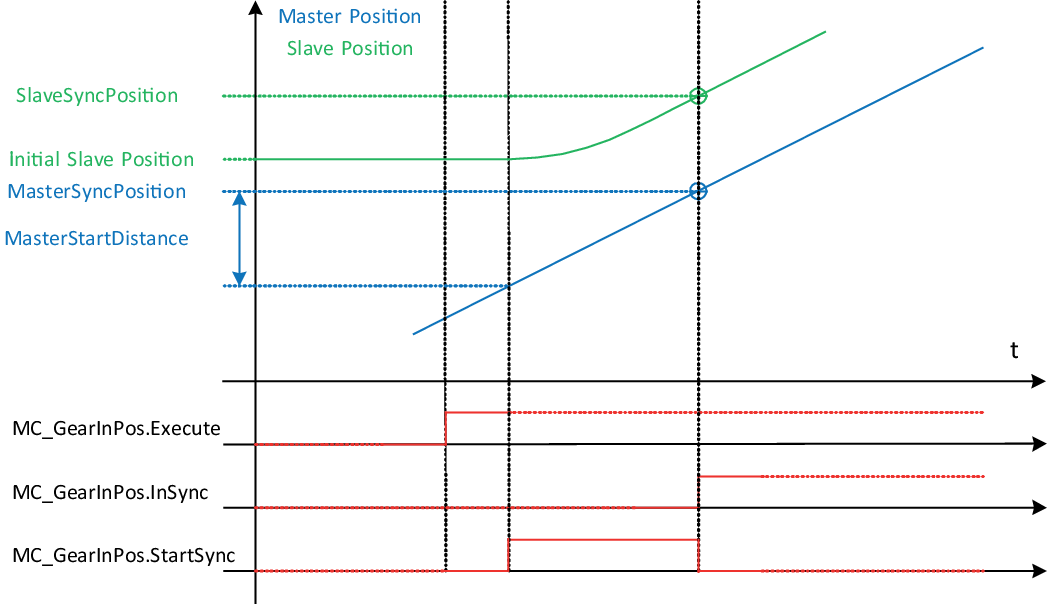
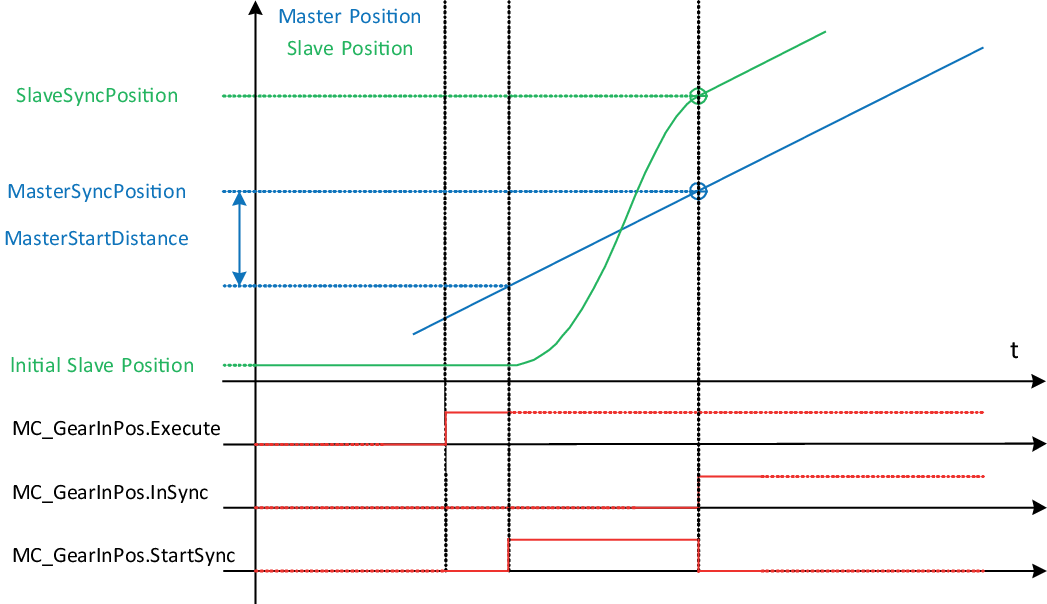
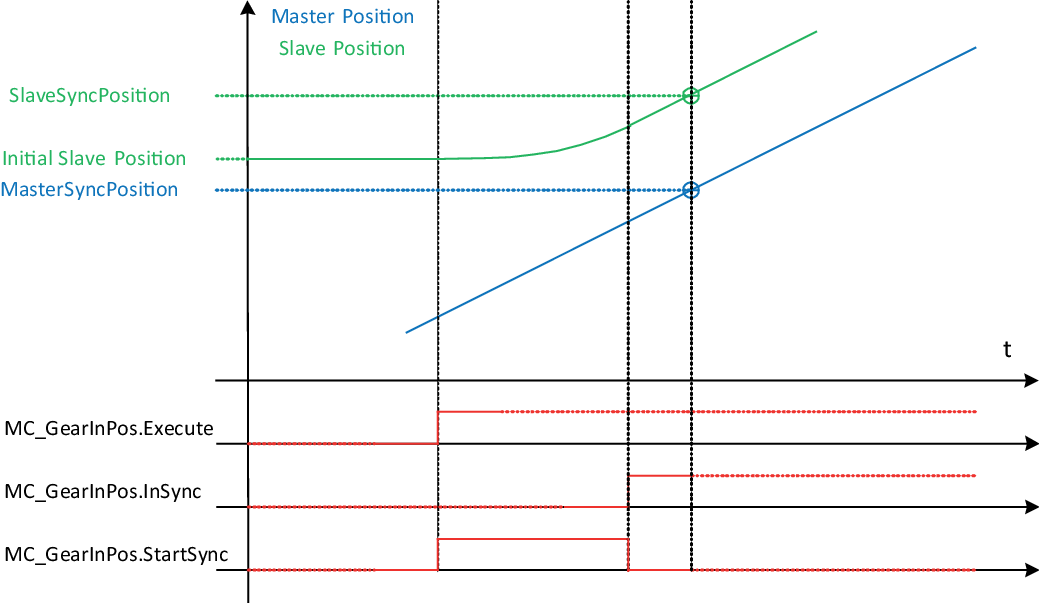
MasterSyncPosition | LREAL | Position der Master-Achse, ab der Master-Achse und Slave-Achse synchron sind. Ist die Master-Achse eine Modulo-Achse, wird die MasterSyncPosition als Modulo-Position interpretiert. |
SlaveSyncPosition | LREAL | Position der Slave-Achse, ab der Master-Achse und Slave-Achse synchron sind. Ist die Slave-Achse eine Modulo-Achse, wird die SlaveSyncPosition als Modulo-Position interpretiert. |
MasterStartDistance | LREAL | Von der Master-Achse zurückgelegter Weg, während die Slave-Achse aufsynchronisiert. |
BufferMode | Chronologische Abfolge des Funktionsbausteins | |
RampInMode | Verhalten beim Aufsynchronisieren:
| |
RampInVelocity | LREAL | Geschwindigkeit bei profilbasiertem Aufsynchronisieren mit RampInMode = eProfileBased |
RampInAcceleration | LREAL | Beschleunigung bei profilbasiertem Aufsynchronisieren mit RampInMode = eProfileBased |
RampInDeceleration | LREAL | Verzögerung bei profilbasiertem Aufsynchronisieren mit RampInMode = eProfileBased |
RampInJerk | LREAL | Ruck bei profilbasiertem Aufsynchronisieren mit RampInMode = eProfileBased |
Direction | MC_DIRECTION | Richtung des Aufsynchronisierens insbesondere bei Modulo-Achsen |
VAR_OUTPUT
Variablenname | Datentyp | Beschreibung |
|---|---|---|
StartSync | BOOL | Slave-Achse synchronisiert sich auf |
InGear | BOOL | Slave-Achse ist synchron zur Master-Achse |
Busy | BOOL | Funktionsbaustein ist aktiv |
Active | BOOL | Funktionsbaustein steuert die Achse |
CommandAborted | BOOL | Der Funktionsbaustein wurde durch einen anderen Befehl abgebrochen |
Error | BOOL | Fehler im Funktionsbaustein aufgetreten |
ErrorID | WORD | Fehlernummer |
StartSync | BOOL | Slave-Achse synchronisiert sich auf |