反向模式 (602)
开始以通过控制字选择的方向进行快速/慢速定位。与“送入”操作模式 (600) 相反,当到达停止传感器时,必须改变旋转方向。在“反向模式”(602) 中改变方向后,电机沿选定的运动方向启动(没有启动位的上升沿)。
下图展示了使用升降台时反向模式的一种典型应用。

在反向模式中,定位是按照与送入相同的原则进行的。然而,在一个方向上完成定位后,将无法在同一个方向上执行另一个送入过程。在同一方向上启动另一个送入过程时会被“就位”信息阻止。阻止功能可防止货物无意中移动到机械止挡位置。
危险
小心重物掉下砸伤。
重伤或死亡。
- 请勿在悬吊物下停留。
- 针对危险区域做好防护措施。
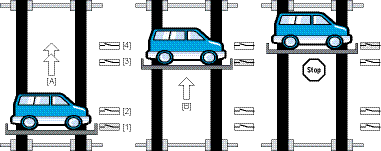
[1] | 传感器“左侧停止” | [A] | 快速运动 |
[2] | 传感器“S/LS/L = 快速档/慢速档 | [B] | 慢速运动 |
[3] | 传感器“S/L1) 右侧” | ||
[4] | 传感器“右侧停止” |
功能描述
功能描述 | |
|---|---|
模式选择 | 模式602 |
前提条件 | 驱动装置已使能。 |
功能描述 | 利用启动位的正边沿,驱动装置以设定的加速斜坡进行加速,直到达到冲刺速度。 “快速档/慢速档”传感器触发后,驱动装置以所设置的减速斜坡制动,直到达到蠕动速度。 “停止”传感器触发后,驱动装置以所设置的停止斜坡进行制动,直到达到静止状态。 将阻止同一方向上的重复启动过程。 |
更多的信息

