Modo reverso (602)
O posicionamento em marcha rápida/lenta inicia na direção selecionada através da palavra de comando. Ao contrário do modo de operação "Carga" (600), é necessária uma mudança de sentido de rotação quando o sensor de parada é atingido. Após uma mudança de direção no "Modo reverso" (602), o motor parte na direção de movimento selecionada sem um flanco ascendente do bit de partida.
A figura abaixo mostra uma aplicação típica do modo reverso em uma estação de elevação.

No modo reverso, o posicionamento segue o mesmo princípio da carga. Após o posicionamento em uma direção, no entanto, não é possível a carga adicional na mesma direção. Iniciar outro processo de carga no mesmo sentido é bloqueado pela mensagem "Em Posição". O bloqueio evita que o material a ser transportado bata acidentalmente na parada mecânica.
PERIGO
Risco de esmagamento devido à queda de carga.
Ferimentos graves ou mesmo a morte.
- Não permanecer sob cargas.
- Isolar devidamente a área de perigo.
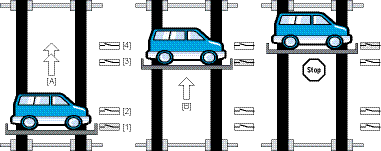
[1] | Sensor "Parada no sentido anti-horário" | [A] | Movimento rápido |
[2] | Sensor "S/LS/L = Velocidade rápida/velocidade reduzida | [B] | Movimento lento |
[3] | Sensor "S/L1) sentido horário" | ||
[4] | Sensor "Parada no sentido horário" |
Descrição da função
Descrição da função | |
|---|---|
Seleção de modo | Modo 602 |
Pré-requisito | O acionamento foi liberado. |
Descrição | Com um flanco positivo do bit de partida, o acionamento acelera com a rampa de aceleração ajustada até atingir a velocidade rápida. Após o acionamento do sensor "Velocidade rápida/velocidade reduzida", o acionamento freia com a rampa de desaceleração ajustada até atingir a velocidade reduzida. Depois que o sensor "Parada" ter sido acionado, o acionamento freia com a rampa de parada ajustada até parar. A partida repetida na mesma direção está bloqueada. |

