送入/送出 (600/601)
提示

在无编码器的运行中,软件限位开关的监控禁用。
请使用硬件限位开关来监控运行范围。
下图展示了“快速/慢速定位”原理的一种典型应用。

在这种辊道中,较长的轨道部分将被分成若干段。
定位的分散化减轻了中央控制系统的负担。独立于总线运行时间,实现了较高的定位精确度。因此,可以快速地逐段更换相应货物。
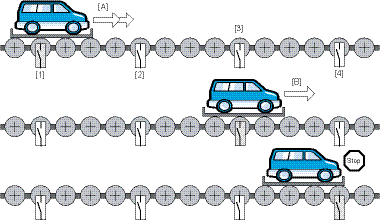
[1] | 传感器“左侧停止” | [A] | 快速运动 |
[2] | 传感器“S/LS/L = 快速档/慢速档 | [B] | 慢速运动 |
[3] | 传感器“S/L1) 右侧” | ||
[4] | 传感器“右侧停止” |
“送入”操作模式
功能描述 | |
|---|---|
模式选择 | 模式600 |
前提条件 | 驱动装置已使能。 |
功能描述 | 通过PO 1:4或PO 1:5选择旋转方向。 利用启动位的正边沿,驱动装置以设定的加速斜坡进行加速,直到达到冲刺速度。 “快速档/慢速档”传感器触发后,驱动装置以所设置的减速斜坡制动,直到达到蠕动速度。 “停止”传感器触发后,驱动装置以减速停止(PO 8或固定设定值)模式进行制动,直到达到静止状态。 将忽略负的设定速度。在单向操作模式下,将忽略相应的未配置方向,变频器在FCB 05中保持停止状态,且不发出故障信息。 在送入操作期间,旋转方向的改变会导致出现故障信息“26754:在运行中改变方向”。在复位或选择了正确的方向后,此时将重新启动送入过程。 |
“送出”操作模式
功能描述 | |
|---|---|
模式选择 | 模式601 |
前提条件 | 驱动装置已使能。 |
说明 | 利用启动位的正边沿,驱动装置以设定的加速斜坡进行加速,直到达到冲刺速度。 取消启动位后或取消旋转方向时,驱动装置将通过已设置的减速斜坡进行制动,直至达到静止状态。 将忽略负的设定速度。在单向操作模式下,将忽略相应的未配置方向,变频器在FCB 05中保持停止状态,且不发出故障信息。 |
更多的信息

