控制器动态
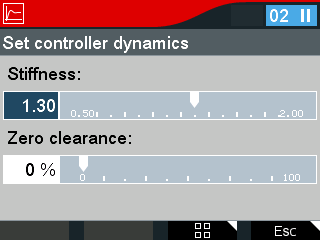
可以通过“Set controller dynamics”(设置控制器动态)功能来设置控制器的
Stiffness
(刚性)和当前驱动装置状态的
Zero clearance
(零背隙)。
更多的信息
输入刚性和零背隙
在PLC模式中设置
在转速模式下设置
❮
❯
CBG21A操作面板
语言
Deutsch
English
Français
Español
汉语
Čeština
Dansk
Suomi
Magyar
Italiano
한국인
Nederlands
Norsk
Polska
Türkçe
Português
SEW-EURODRIVE
首页
优化驱动机构
控制器动态