Starting torque
The highest operating torque is required for acceleration with maximum load in upwards hoisting direction.
As a rule, design the 4-pole gearmotor for a maximum speed of
- 2100 rpm (70 Hz) at a transition speed of 1500 rpm (50 Hz)
- 2500 rpm (83 Hz) at a transition speed of 1800 rpm (60 Hz)
This means the input speed of the gear unit is approx. 1.4 times higher. This is why you have to select a 1.4 times higher gear unit reduction ratio. This measure means that the motor does not lose any torque at the input shaft in the field weakening range (50 – 70 Hz or 60 – 83 Hz). The higher gear unit ratio compensates for the inversely proportionate decrease in torque in relation to speed. Furthermore, the startup torque is 1.4 times greater. Further advantages are that the speed range is greater and the self-cooling of the motor is more powerful.
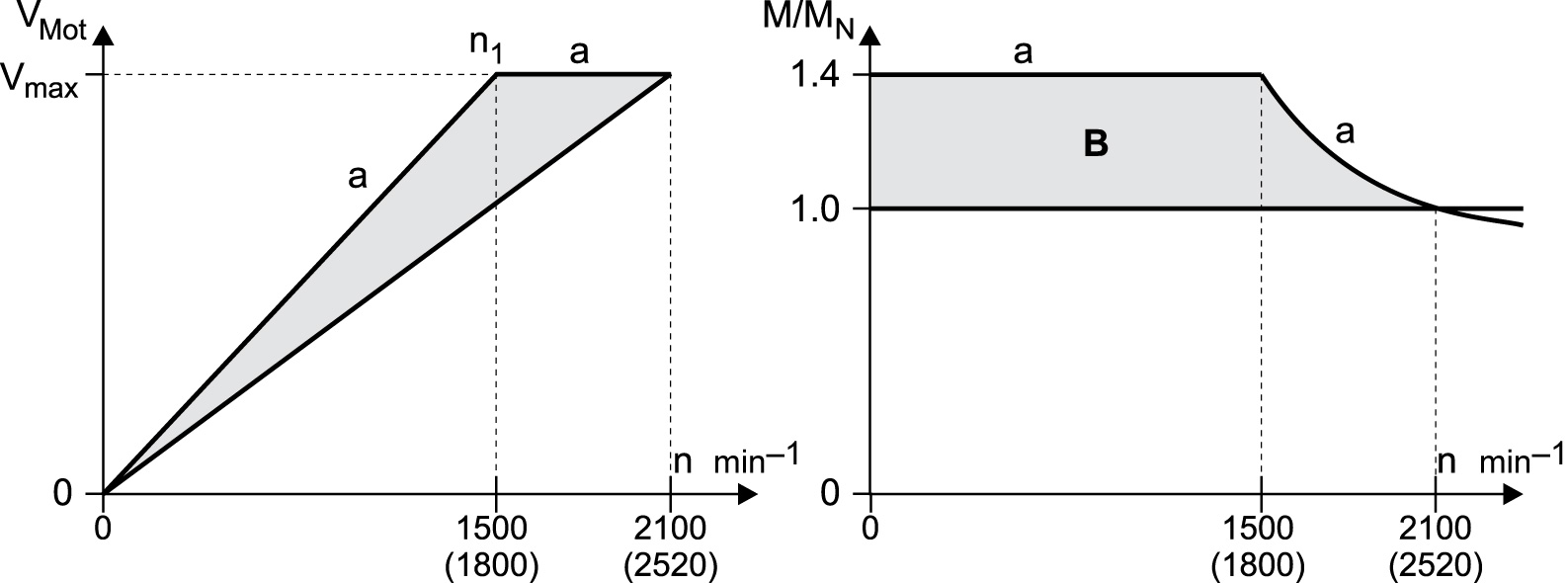
Hoist voltage/speed characteristic curve
|
9007199272646667 |
a = Recommended voltage/speed characteristic curve and resultant torque profile B = Torque reserve range |
Select the motor power for hoists according to the load type:
- S1 (100% cdf): Select the motor power of the next higher motor type than the selected inverter power, e.g. for lengthy upwards travel or continuous elevators.
- S3 (40% cdf): Select the motor power according to the selected inverter power.
Activate the hoisting function by selecting operating mode P700 = VFC & hoist regardless of the above guidelines.
