PI controller
The illustration below shows the basic structure of PI controller.

You can use the implemented PI controller for temperature control, pressure control or other applications. The PI controller can be switched on and off.
Structural diagram for implementing the PI controller
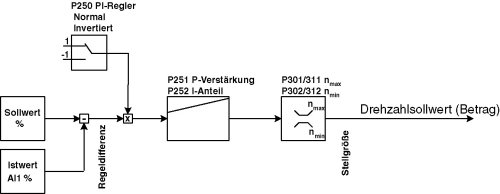
Connect the actual value from the sensor (temperature, pressure, etc.) to analog input AI1. You can scale the actual value up or down and assign an offset value, thereby adapting it to the working range of the PI controller.
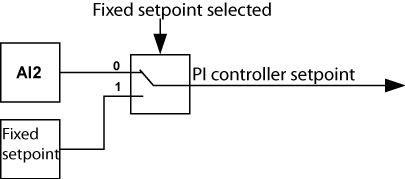
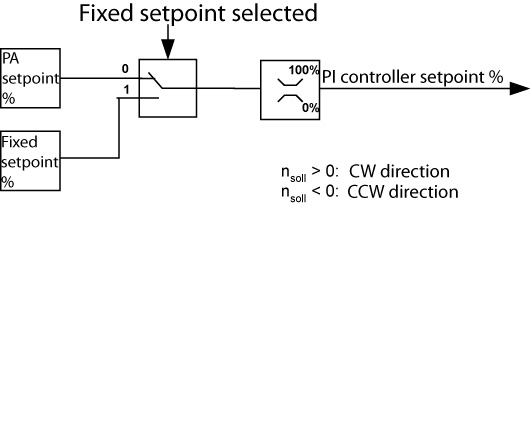
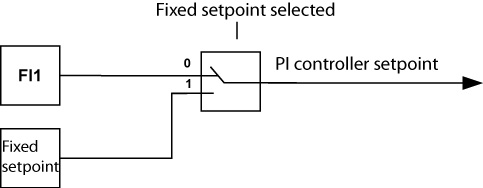
You can set the PI-controller setpoint using one of the six programmed fixed setpoints or specify the setpoint using the RS485 or fieldbus (SBus) interface (P100 Setpoint source). Furthermore you can specify the setpoint using the local setpoint potentiometer.
The correcting variable of the PI controller is a speed setpoint limited to a minimum and maximum speed (P301 Minimum speed 1 and P302 Maximum speed 1). The setting of the speed ramp times has no effect when the PI controller is active.