Bauchschwingen
- Konfigurieren Sie im Bereich "Grundeinstellungen" die Mechanik-Parameter der Applikation. Folgenden Grafik veranschaulicht die für diesen Applikationstyp verfügbaren Parameter. Detaillierter Beschreibungen zu den Parametern finden Sie im Kapitel Antipendelregelung. Die "Entfernung zwischen Hub- und Fahrwagen" wird durch "Höhe des Mastes" / 2 berechnet, da auf dieser Höhe die Bauchschwingung am größten ist. Der Wert wird für die Parameterermittlung von "Federsteifigkeit zwischen Mast und Fahrwagen" sowie den "Dämpfungsgrad zwischen Mast und Fahrwagen" verwendet. Wenn Sie die "Federsteifigkeit zwischen Mast und Fahrwagen" sowie den "Dämpfungsgrad zwischen Mast und Fahrwagen" z. B aus Mechanik-Simulationen nicht bereits kennen, können Sie hier eine Unterstützung für Parameterermittlung aktivieren.
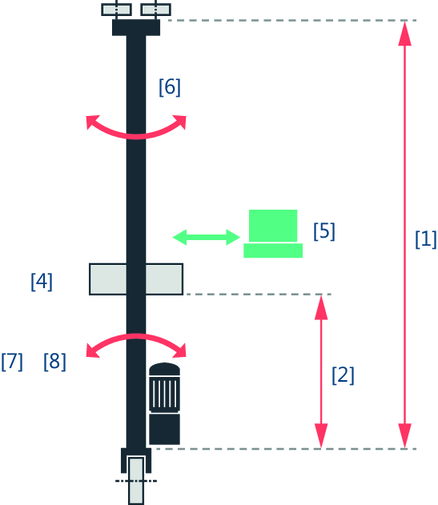
[1] | Höhe des Mastes |
[2] | Entfernung zwischen Hub- und Fahrwagen (Halbe Hubhöhe) |
[4] | Masse des Hubwagens |
[5] | Masse der Nutzlast |
[6] | Masse des Mastes |
[7] | Federsteifigkeit zwischen Mast und Fahrwagen HINWEIS: Zum Ermitteln dieses Parameters siehe Kapitel Steifigkeit ermitteln. |
[8] | Dämpfungsgrad zwischen Mast und Fahrwagen HINWEIS: Zum Ermitteln dieses Parameters siehe Kapitel Steifigkeit ermitteln. |
- Legen Sie die wirksame Hubhöhe fest, indem Sie die "Konfigurierte Hubhöhe/Offset" und die "Hubhöhe vom Feldbus in mm" im Bereich "Konfiguration wirksame Hubhöhe" konfigurieren. Die wirksame Hubhöhe berechnet sich aus der Summe dieser 2 Parameter und beschreibt die Entfernung zwischen Hub- und Fahrwagen, auf deren Basis die Schwingungsunterdrückung durchgeführt werden soll.
- Konfigurierte Hubhöhe/Offset: Feste Hubhöhe oder ein Offset in [m]. Häufig ist dies die Hubhöhe mit der stärksten Schwingung und damit gleich der halben Masthöhe.
- Hubhöhe vom Feldbus in mm: Über die Feldbusschnittstelle kann mit dem Prozessdatenwort "Entfernung zwischen Hub- und Fahrwagen" ein Wert in mm vorgegeben werden. Dadurch können z. B. veränderliche Hubhöhen aus externen Achsen berücksichtigt werden.
- Legen Sie das Zeitfenster fest, indem Sie die "Schwingungsunterdrückung " im Bereich "Zeitfenster" konfigurieren. Je größer das Zeitfenster desto mehr Zeit wird für die Korrekturbewegung der Schwingungsunterdrückung zur Verfügung gestellt und die Dynamik des Korrektursignals verringert. Der Positioniervorgang verlängert sich daher um das Zeitfenster. Die Ruckzeit der Fahrachse kann hingegen gleichzeitig reduziert werden. Für den Parameter wird ein Wert vorgeschlagen, den Sie übernehmen und ggf. anpassen können. Zudem wird in diesem Bereich die "Zykluszeit der HighPrio Task zur Grenzwertberechnung" angezeigt. Der angezeigte Wert wird vom Parameter "Sollwertzyklus Steuerung" des untergeordneten Teilnehmers gezogen.
