Pendelschwingen
- Legen Sie die wirksame Pendellänge (bei dieser Pendellänge soll die Schwingung unterdrückt werden) fest, indem Sie die "Konfigurierte Pendellänge/Offset", "Pendellänge aus Achse" und "Pendellänge vom Feldbus in mm" im Bereich "Konfiguration wirksame Pendellänge" konfigurieren. Folgenden Grafik veranschaulicht die für diesen Applikationstyp verfügbaren Parameter. Detaillierter Beschreibungen zu den Parametern finden Sie im Kapitel Antipendelregelung. Die wirksame Pendellänge berechnet sich aus der Summe dieser 3 Parameter und entspricht z. B. der tatsächlichen Länge in [m] des Seils einer Kran-Applikation vom Seilfestpunkt bis zum Seilende oder bei angehängter Last bis zu dessen Schwerpunkt.
- Konfigurierte Pendellänge/Offset: Vorgabe einer festen Pendellänge oder eines Offsets in [m]
- Pendellänge aus Achse: Verwenden einer Pendellänge aus einer wählbaren Achse, Achsgruppe oder eines MOVIKIT® EncoderInterface. Dadurch erfolgt die Schwingungsunterdrückung immer in Relation zur Pendellänge. Dazu über die eingeblendeten Einstellungsfelder die Achse für Hubposition und die Anwendereinheiten der Hubposition wählen. Der "Seilfestpunkt" muss als die Position der Hubachse an der eingezeichneten Stelle angegeben werden. Die "Wirkrichtung Hub" muss positiv konfiguriert werden, wenn die Hubposition bei Fahrt nach unten größer wird (Seil wird länger). Der Wert für Pendellänge aus Achse berechnet sich aus: ((Hubposition × Anwendereinheit) - Seilfestpunkt) × Wirkrichtung Hub.
- Pendellänge vom Feldbus in mm: Über die Feldbusschnittstelle kann mit dem Prozessdatenwort "Entfernung zwischen Hub- und Fahrwagen" ein Wert in [mm] vorgegeben werden. Dadurch können z. B. veränderliche wirksame Pendellängen aufgrund wechselnder Lastschwerpunkten oder Hubpositionsinformationen aus externen Achsen berücksichtigt werden.
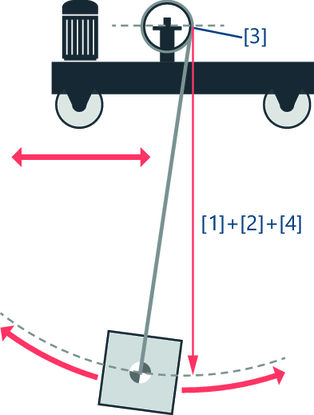
[1] | Konfigurierte Pendellänge/Offset |
[2] | Pendellänge aus Achse |
[3] | Seilfestpunkt |
[4] | Pendellänge vom Feldbus in mm |
[1]+[2]+[4] | Wirksame Pendellänge |
- Legen Sie das Zeitfenster fest, indem Sie die "Schwingungsunterdrückung " im Bereich "Zeitfenster" konfigurieren. Je größer das Zeitfenster desto mehr Zeit wird für die Korrekturbewegung der Schwingungsunterdrückung zur Verfügung gestellt und die Dynamik des Korrektursignals verringert. Der Positioniervorgang verlängert sich daher um das Zeitfenster. Die Ruckzeit der Fahrachse kann hingegen gleichzeitig reduziert werden. Für den Parameter wird ein Wert vorgeschlagen, den Sie übernehmen und ggf. anpassen können. Zudem wird in diesem Bereich die "Zykluszeit der HighPrio Task zur Grenzwertberechnung" angezeigt. Der angezeigte Wert wird vom Parameter "Sollwertzyklus Steuerung" des untergeordneten Teilnehmers gezogen.
- Konfigurieren Sie einen Pendellängenfilter zur Filterung des Signals der wirksamen Pendellänge. Wenn die Pendellänge von einer interpolierten Achse des selben Controllers verwendet wird, ist kein Pendellängenfilter erforderlich (Einstellung "Keine Filterung"). Wenn die Pendellänge sich während der Beschleunigung oder Verzögerung der Fahrachse ändert, ist der Pendellängenfilter erforderlich (Einstellung "Dynamikfilter"), wenn ...
- die Pendellänge über Feldbus oder ein MOVIKIT® EncoderInterface vorgegeben wird
- die Pendellänge verrauscht ist (z. B. wegen Sensoren oder Geber)
- die Pendellänge in der 2.Ableitung nicht stetig ist (z. B. wegen eines additiven Positionssprungs über Feldbus)
