Mastschwingen
- Legen Sie die "Entfernung zwischen Hub- und Fahrwagen" (bei dieser Hubhöhe soll die Schwingung unterdrückt werden) fest, indem Sie die "Quelle der Entfernung zwischen Hub- und Fahrwagen" konfigurieren.
- Konfigurationswert: Den manuell über das Einstellungsfeld "Entfernung zwischen Hub- und Fahrwagen" im Bereich "Grundeinstellungen" vorgegebenen Wert verwenden.
- Konfigurierte Achse: Die Position einer konfigurierten Achse wie z. B. der Hubachse als Wert verwenden. Dadurch erfolgt die Schwingungsunterdrückung immer passend zur Hubhöhe bzw. zur Entfernung zwischen dem Hub- und Fahrwagen. Dazu über die eingeblendeten Einstellungsfelder die Achse wählen und konfigurieren. Ein "Hubpositions-Offset" kann dabei zur Ausgleichsrechnung verwendet werden, wenn der Wert aus der Achse nicht der tatsächlichen Entfernung zwischen Hub- und Fahrwagen entspricht. Zudem können die Anwendereinheit der Hubachse gewählt oder ein benutzerdefinierter Umrechnungsfaktor für die Anwendereinheit in Meter eingegeben werden.
- Konfigurieren Sie im Bereich "Grundeinstellungen" die Mechanik-Parameter der Applikation. Folgenden Grafik veranschaulicht die für diesen Applikationstyp verfügbaren Parameter. Detaillierter Beschreibungen zu den Parametern finden Sie im Kapitel Antipendelregelung. Wenn Sie die "Federsteifigkeit zwischen Mast und Fahrwagen" sowie den "Dämpfungsgrad zwischen Mast und Fahrwagen" z. B aus Mechanik-Simulationen nicht bereits kennen, können Sie hier eine Unterstützung für Parameterermittlung aktivieren.
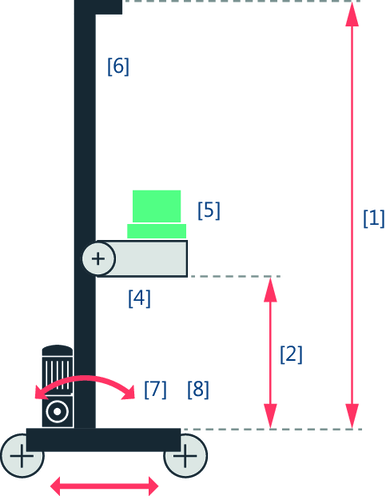
[1] | Höhe des Mastes |
[2] | Entfernung zwischen Hub- und Fahrwagen |
[4] | Masse des Hubwagens |
[5] | Masse der Nutzlast |
[6] | Masse des Mastes |
[7] | Federsteifigkeit zwischen Mast und Fahrwagen HINWEIS: Zum Ermitteln dieses Parameters siehe Kapitel Steifigkeit ermitteln. |
[8] | Dämpfungsgrad zwischen Mast und Fahrwagen HINWEIS: Zum Ermitteln dieses Parameters siehe Kapitel Steifigkeit ermitteln. |
- Legen Sie das Zeitfenster fest, indem Sie die "Rampenzeit Spannungsaufbau" und die "Ruckzeit Spannungsaufbau" im Bereich "Zeitfenster" konfigurieren. Diese Parameter beschreiben die jeweilige Dauer des mechanischen Spannungsaufbaus. Bei längeren Zeiten wird mehr Zeit für die Schwingungsunterdrückung genutzt und damit die Dynamik des Korrektursignals verringert. Der Positioniervorgang verlängert sich um diese Zeiten. Die Ruckzeit der Fahrachse kann hingegen gleichzeitig reduziert werden. Für die beiden Parameter wird ein Wert vorgeschlagen, den Sie übernehmen und ggf. anpassen können. Zudem wird in diesem Bereich die "Zykluszeit der HighPrio Task zur Grenzwertberechnung" angezeigt. Der angezeigte Wert wird vom Parameter "Sollwertzyklus Steuerung" des untergeordneten Teilnehmers gezogen.
