SOS – Safe Operating Stop
The SOS safety sub-function prevents the motor from deviating from the stop position by more than a specified absolute value. The drive delivers the power to keep the motor in position. If the specified absolute value is exceeded, the SOS safety sub-function will be triggered and a fault response (STO) will be initiated at the same time.
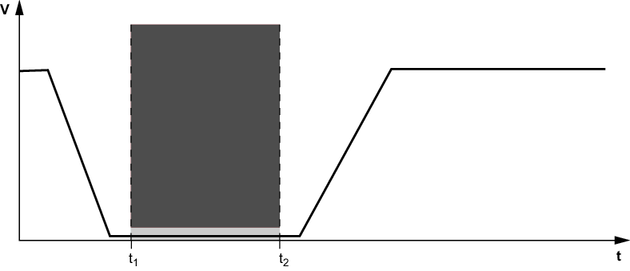
= | SOS safety sub-function monitored | |
| = | STO safety sub-function active |
v | = | Speed |
t | = | Time |
t1 | = | Point in time at which SOS is activated. |
t2 | = | Point in time at which SOS is deactivated. |
