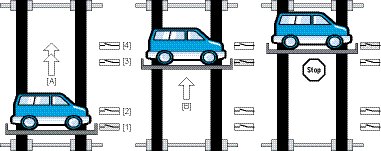
下图展示了升降台的一种典型应用。
在反向模式中,定位是按照与送入相同的原则进行的。然而,在一个方向上完成定位后,将无法在同一个方向上执行另一个送入过程。在同一方向上启动另一个送入过程时会被“就位”信息阻止,并且会防止无意中驶至机械止挡位置。
[1]
传感器“左侧停止”
[A]
快速运动
[2]
传感器“S/LS/L = 快速档/慢速档左侧”
[B]
慢速运动
[3]
传感器“S/L1) 右侧”
[4]
传感器“右侧停止”
 左侧”
左侧”