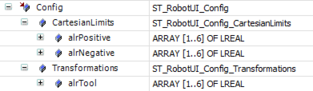
Configuration (Config)
Interface in the IEC Editor
The variables are initially written with the configuration made in MOVISUITE®.
The variables are applied by the robot controller if the robot is not enabled, i.e. the variable Interface_MyRobot.Basic.OUT.eEnableState returns one of the following states (namespace: SEW_MK_Robotics.SEW_IRobHPub).
- EmergencyStoppedAxes
- EmergencyStoppingAxes
- WaitingForSetpointActive
This is, among others, the case if Interface_MyRobot.Basic.IN.xEnable_EmergencyStop is "FALSE" or Interface_MyRobot.xError is "TRUE".
INFORMATION

Information on consistently adjusting the tool transformation, e.g. for fine-grained corrections of the path based on sensor information, can be found in chapter Steady adjustments to the tool transformation.
Additional information
