Konfiguration (Config)
Schnittstelle im IEC-Editor
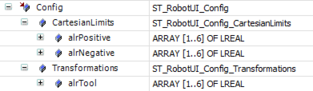
Die Variablen werden initial mit der in MOVISUITE® durchgeführten Konfiguration des Roboters beschrieben.
Die Variablen werden durch die Robotersteuerung übernommen, wenn der Roboter nicht freigegeben ist, also die Variable Interface_MyRobot.Basic.OUT.eEnableState einen der folgenden Zustände ausgibt (Namensraum: SEW_MK_Robotics.SEW_IRobHPub).
- EmergencyStoppedAxes
- EmergencyStoppingAxes
- WaitingForSetpointActive
Das ist u. a. der Fall, wenn Interface_MyRobot.Basic.IN.xEnable_EmergencyStop "FALSE" oder Interface_MyRobot.xError "TRUE" ist.
HINWEIS

Informationen zur stetigen Anpassung der Werkzeugtransformation, z. B. zur Feinkorrektur der Bahn basierend auf Sensorinformation, finden Sie im Kapitel Stetige Anpassung der Werkzeugtransformation.
Weiterführende Informationen
