Referencing and function test on the real robot
Perform a function test on the robot by carrying out the following steps:
- Check the positive direction of movement of all axes in manual mode of MOVISUITE® according to what is displayed in the 3D simulation from step 4 in chapter Function test for the simulated robot. If the positive direction of movement of a real axis does not match the positive direction of movement in the 3D simulation, configure a direction of rotation reversal in MOVISUITE®. See also Configuring subordinate nodes.
- Perform startup with the RobotMonitor by following the steps described in chapter Process start.
- Use the referencing function integrated in MOVIKIT® Robotics to reference the axes according to the zero position that you determined in step 4 in chapter Function test for the simulated robot. To do this, change to referencing mode in the RobotMonitor by selecting HOMING mode in the drop-down menu on the right under "JOG CART", "JOG JOINT" and "JOG AXIS". You can now see whether the respective axis is already referenced. If the axis is not referenced or is referenced incorrectly, press and hold the start button of the respective axis to reference the axis. Axes that are not to be referenced switch to emergency stop for the duration of referencing.
- Jog each axis of the robot with JOG_JOINT (+ and - buttons) and compare the real movement with the movement shown in the 3D simulation. If you detect a deviation of the zero position or the direction of movement, perform step 1 or step 2 again for the respective axis.
- Jog each axis of the robot with JOG_JOINT (+ and - buttons) by a certain distance for linear axes or by an angle for rotary axes, e.g. 100 mm or 90°. Check whether the respective axis of the robot covers exactly this distance or angle. If this is not the case, correct the settings in the drive train of the axis in MOVISUITE®.
- Next, use JOG_JOINT (+ and - buttons) to jog the robot to the work envelope limits and verify these limits.
- Next, use JOG_CART (+ and - buttons) to jog the robot to the work envelope limits and verify these limits.
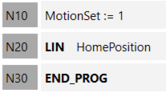
- Create the following test program:
- Start the test program and wait until the end of program.
- Change the home position several times and test the program again. The movements of the real robot must correspond to the movements shown in the 3D simulation.
- Create an IEC boot application.
INFORMATION

Referencing of virtual axes is not possible with the software module. Virtual axes permanently report that they are not referenced. Simulated axes, however, are always referenced. Real axes are not referenced during referencing. Referencing is also possible in the UI and via PD (see chapters IEC programming and Process data assignment). It is also possible to reference the axes using manual mode in MOVISUITE® and/or via MOVIKIT® MultiMotion (request access, activate and start reference travel, return access after successful execution).