Referenzieren und Funktionstest am realen Roboter
Führen Sie einen Funktionstest des Roboters durch, indem sie folgende Schritte durchführen:
- Prüfen Sie die positive Bewegungsrichtung aller Achsen über den Handbetrieb der MOVISUITE® gemäß der Anzeige in der 3D-Simulation aus Schritt 4 in Kapitel Funktionstest des simulierten Roboters. Falls die positive Bewegungsrichtung einer realen Achse nicht mit der positiven Bewegungsrichtung in der 3D-Simulation übereinstimmt, konfigurieren Sie eine Drehrichtungsumkehr in MOVISUITE®. Siehe dazu Untergeordnete Knoten konfigurieren.
- Führen Sie den Hochlauf mit dem RobotMonitor durch, indem Sie die Schritte aus dem Kapitel Prozess-Start durchführen.
- Referenzieren Sie die Achsen über die in MOVIKIT® Robotics integrierte Referenzierfunktion gemäß der Nullstellung, die Sie in Schritt 4 im Kapitel Funktionstest des simulierten Roboters ermittelt haben. Wechseln Sie dafür im RobotMonitor in den Referenzierbetrieb, indem Sie rechts im Dropdown-Menü unter "JOG CART", "JOG JOINT" und "JOG AXIS" den Referenzierbetrieb HOMING auswählen. Sie sehen nun, ob die jeweilige Achse bereits referenziert ist. Ist die Achse nicht oder falsch referenziert, drücken und halten Sie den Start-Button der jeweiligen Achse, um die Achse zu referenzieren. Die Achsen, die nicht referenziert werden sollen, wechseln für die Dauer des Referenzierens in den Not-Halt.
- Tippen Sie jede Achse des Roboters mit JOG_JOINT (+ und - Schaltflächen) und vergleichen Sie die reale Bewegung mit der in der 3D-Simulation dargestellten Bewegung. Falls Sie eine Abweichung der Nullstellung oder der Bewegungsrichtung erkennen, führen Sie für die jeweilige Achse nochmals Schritt 1 oder Schritt 2 durch.
- Tippen Sie jede Achse des Roboters mit JOG_JOINT (+ und - Schaltflächen) um eine bestimmte Strecke bei Linearachsen bzw. Winkel bei Drehachsen, z. B. 100 mm bzw. 90°. Prüfen Sie, ob die jeweilige Achse des Roboters genau diese Strecke bzw. diesen Winkel zurücklegt. Wenn dies nicht der Fall ist, korrigieren Sie bitte die Einstellungen im Antriebsstrang der Achse in MOVISUITE®.
- Tippen Sie anschließend den Roboter mit JOG_JOINT (+ und - Schaltflächen) an die Arbeitsraumgrenzen und überprüfen Sie diese.
- Tippen Sie anschließend den Roboter mit JOG_CART (+ und - Schaltflächen) an die Arbeitsraumgrenzen und überprüfen Sie diese.
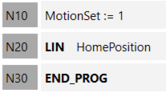
- Erstellen Sie folgendes Testprogramm
- Starten Sie das Testprogramm und warten Sie bis das Programmende erreicht ist.
- Ändern Sie mehrmals die Position der Grundstellung und testen Sie das Programm erneut. Die Bewegungen des realen Roboters müssen mit den in der 3D-Simulation dargestellten Bewegungen übereinstimmen.
- Erzeugen Sie eine IEC-Bootapplikation.
HINWEIS

Das Referenzieren von virtuellen Achsen ist mit dem Softwaremodul nicht möglich. Virtuelle Achsen melden dauerhaft, dass sie nicht referenziert sind. Simulierte Achsen hingegen sind immer referenziert. Reale Achsen sind während des Referenzierens nicht referenziert. Das Referenzieren ist auch im UI und über PD möglich (siehe Kapitel IEC-Programmierung bzw. Prozessdatenbelegung). Außerdem ist das Referenzieren der Achsen über den Handbetrieb in MOVISUITE® und oder über das MOVIKIT® MultiMotion (Zugriff anfordern, Referenzfahrt aktivieren und starten, nach erfolgreicher Ausführung Zugriff zurückgeben) möglich.