Funktionstest des simulierten Roboters
- Es liegt kein Fehler vor.
- Klicken sie auf die Schaltfläche [Simulate Inverters].
- Führen Sie den Hochlauf mit dem RobotMonitor durch, indem Sie die Schritte aus dem Kapitel Prozess-Start durchführen.
- Konfigurieren Sie die Bewegungsparametersätze.
- Tippen Sie jede Achse des Roboters mit JOG_JOINT (+ und - Schaltflächen) in die Nullstellungen der Gelenkachsen. Die Werte der Gelenkachsen werden im RobotMonitor im Fenster der 3D-Simulation links oben angezeigt. Merken Sie sich die Stellung der Gelenkachsen in der Nullstellung sowie die positive Bewegungsrichtung der Gelenkachsen, wie sie in der 3D-Simulation angezeigt werden. Sie müssen die realen Achsen entsprechend referenzieren und auch die Drehrichtung der realen Achsen entsprechend einstellen. Siehe dazu Untergeordnete Knoten konfigurieren.
- Tippen Sie den Roboter mit JOG_JOINT (+ und - Schaltflächen) an die Arbeitsraumgrenzen und überprüfen Sie diese.
- Tippen Sie den Roboter mit JOG_CART (+ und - Schaltflächen) an die Arbeitsraumgrenzen und überprüfen Sie diese.
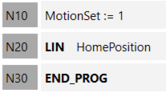
- Erstellen Sie folgendes Testprogramm
- Starten Sie das Testprogramm und warten Sie bis das Programmende erreicht ist.
- Ändern Sie mehrmals die Position der Grundstellung und testen Sie das Programm erneut.