Modulo axes
Control the axis in the Gearing.Config.Start structure as follows:
Interface in the IEC Editor

Procedure
- While the master axis is moving, the xStart start signal is set in the "Gearing" mode of the slave axis.
- With the configuration eTransitionType = "NONE" and eStartMode = "WITH_CW_CCW_REFERENCE_POSITION", the eGearingState state first switches from "STOPPED" (0) to "WAITING_FOR_STARTPOSITION" (1).
- As soon as the master axis crosses the configured reference position lrGearInReferencePosition = "0.0," the slave axis becomes synchronous. The eGearingState state switches from "WAITING_FOR_STARTPOSITION" (1) to "ACTIVE" (3).
- Then the master axis runs while the slave axis follows it.
Trace recording
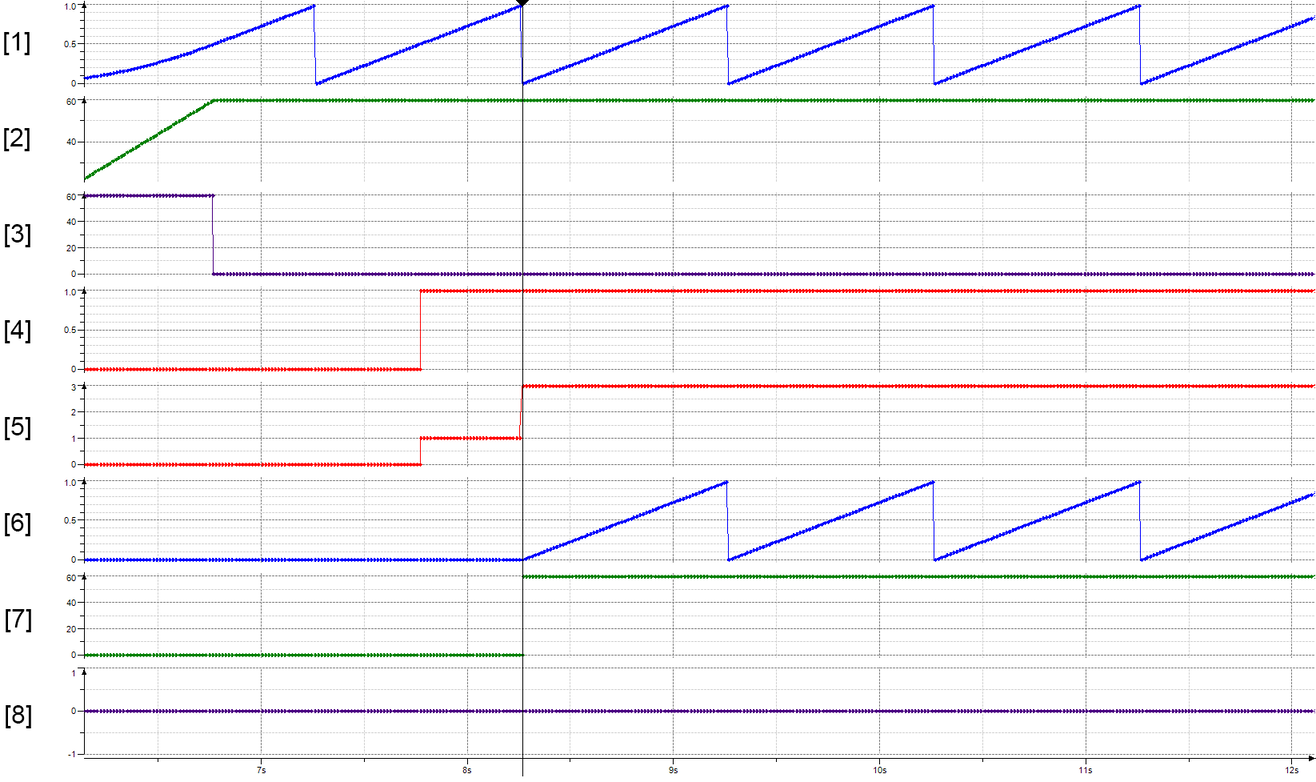
[1] | Position of the master axis |
[2] | Speed of the master axis |
[3] | Acceleration of the master axis |
[4] | xStart start signal of the Gearing mode |
[5] | eGearingState state of the Gearing mode |
[6] | Position of the slave axis |
[7] | Speed of the slave axis |
[8] | Acceleration of the slave axis |
The phase equivalence of the master and slave axes shown in the trace recording occurs because the position of the slave axis at the start is the same as the configured reference position lrGearInReferencePosition. If the slave axis is in a different position upon starting, a corresponding phase shift occurs:
Trace recording
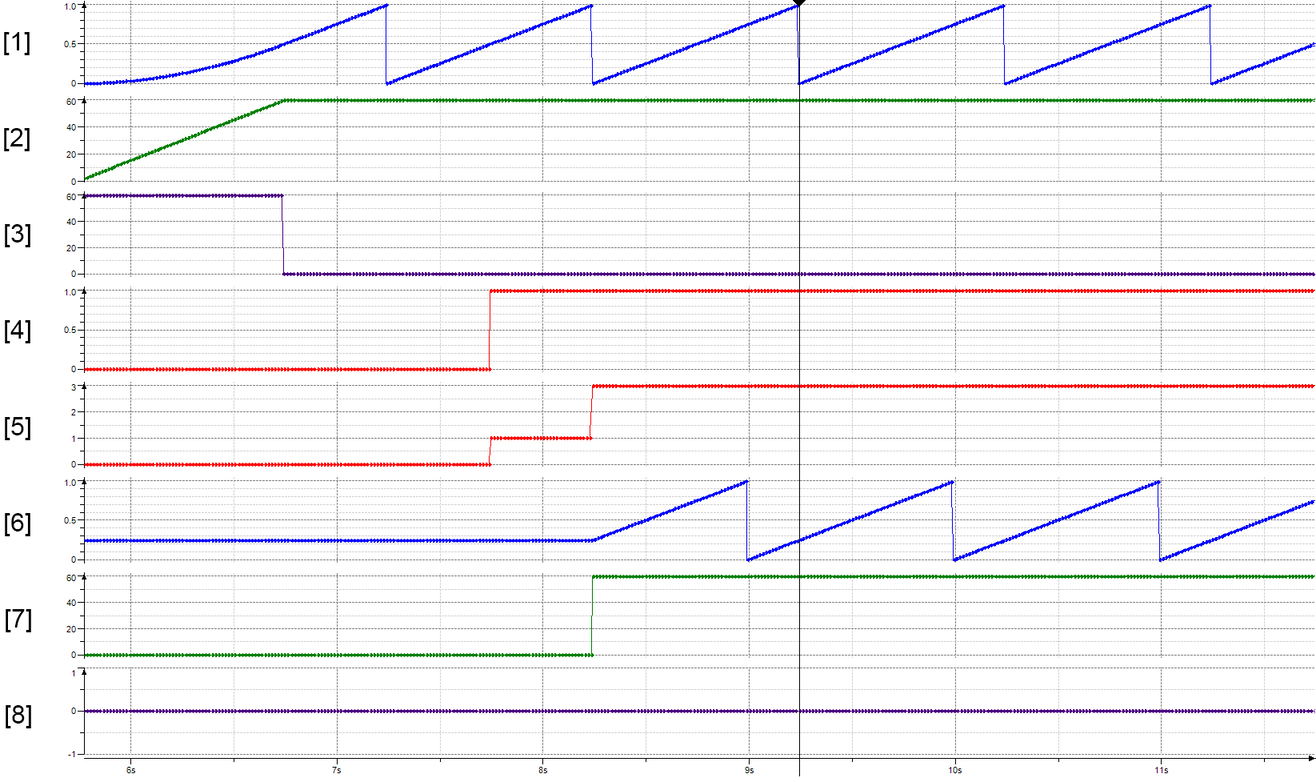
[1] | Position of the master axis |
[2] | Speed of the master axis |
[3] | Acceleration of the master axis |
[4] | xStart start signal of the Gearing mode |
[5] | eGearingState state of the Gearing mode |
[6] | Position of the slave axis |
[7] | Speed of the slave axis |
[8] | Acceleration of the slave axis |
For modulo axes, equivalent phases can be achieved during synchronization if the current position of the slave axis is taken into account as the reference position during synchronization. In the following trace recording, reference position lrGearInReferencePosition = "0.25" has been configured, which corresponds to the position of the slave axis at the start. The two axes are in phase.
Trace recording
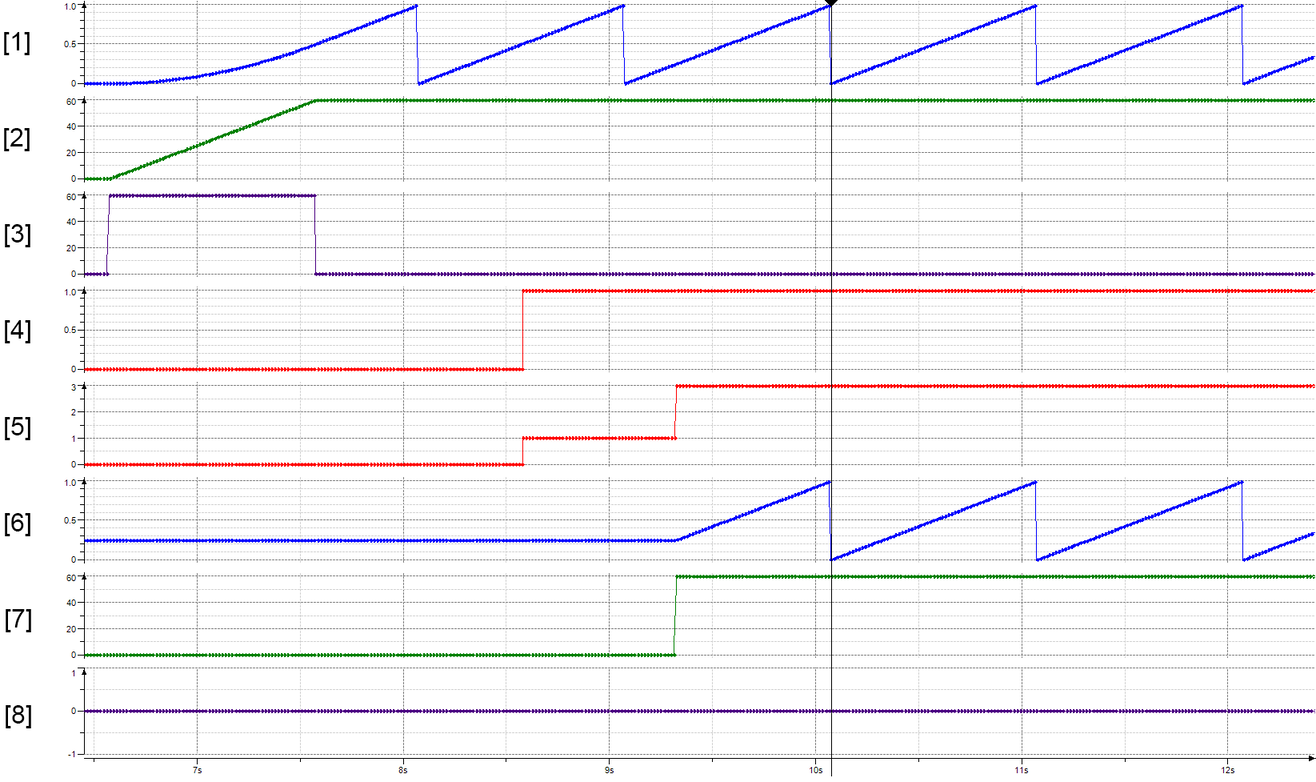
[1] | Position of the master axis |
[2] | Speed of the master axis |
[3] | Acceleration of the master axis |
[4] | xStart start signal of the Gearing mode |
[5] | eGearingState state of the Gearing mode |
[6] | Position of the slave axis |
[7] | Speed of the slave axis |
[8] | Acceleration of the slave axis |
