M0 Planned stop
At this point, the interpretation of the program code and the motion is interrupted until the user issues the enable. To that end, the G-code import is used to insert the SRL command WAITMOTION DONE at the position of the M0 command before calling the CallFunction with index 0. No path event is used in the process. The release condition is evaluated only after the motion of the previous segment has been fully executed.
The planned stop functionality can be imported as an IEC code example, and the example can be adjusted and used. See also chapter Call functions for G-code.
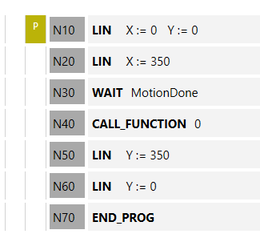
The following G-code example shows the import of the M0 command:
G1 X0 Y0
G1 X350
M0
G1 Y350
G1 Y0
M30
|
INFORMATION
Even if the enable for continued travel has been set before reaching the CallFunction 0 (N40), the WaitMotion Done command creates a stop point. No blending is performed with the following motion command. The following motion commands are interpreted only if the motions are completed before WaitMotion Done and the CallFunction with Index 0 returns the value "TRUE".
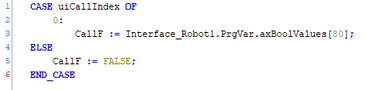
The user must program the release condition in the CallFunction with index 0. As long as the user code returns the value "FALSE" in the CallFunction, the program interpreter stops at this point (CallF: = FALSE). No new motion commands are interpreted. The continued travel is resumed only if the user code in the CallFunction returns the value "TRUE" (CallF := TRUE)
In the following example, continued travel is possible only if the SRL-BOOL variable with Index 80 has been set to "TRUE". At this point, the user can also use other conditions or inputs (digital inputs/outputs).